dts code workbench
Contents
dts code workbench#
This command allows us to run the learning experience code on either a simulated or a real Duckiebot.
No flags#
When no flags are given, only a ROS container is run and the VNC allows us to have a virtual desktop to connect to it.
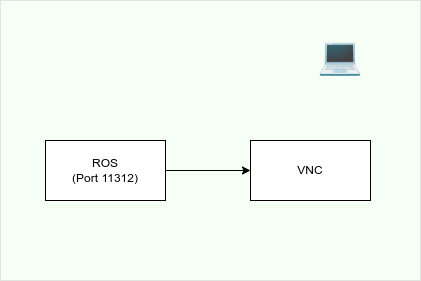
Fig. 32 Containers running on the Duckiebot and base station with the --local flag#
--sim#
With the --sim flag, the code is executed on the local machine and communicates with a simulator of the Duckiebot.
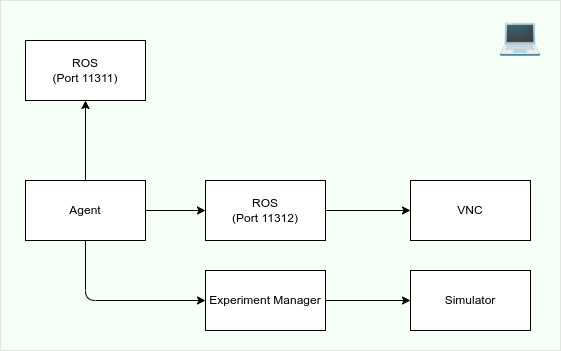
Fig. 33 Containers running on the Duckiebot and base station#
--duckiebot#
With the --duckiebot flag we execute the agent code on the real Duckiebot.
The communication between the FIFO bridge and the ROS stack of the real Duckiebot enables the agent to control the Duckiebot.
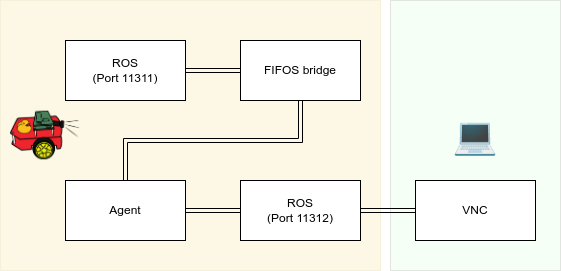
Fig. 34 Containers running on the Duckiebot and base station#
--local#
When the --local flag is passed, the agent, the FIFO bridge and the other ROS container are executed on the local machine.
The communication between the FIFO bridge and the ROS stack of the real Duckiebot enables the agent to control the Duckiebot.
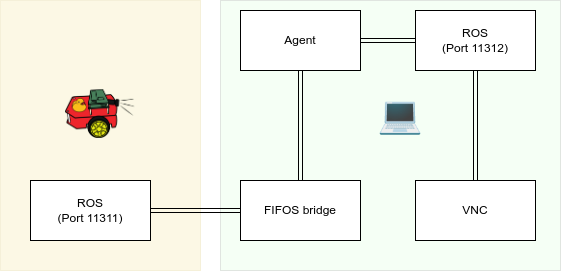
Fig. 35 :name: workbench-duckiebot-local-1
:alt: Containers running on the Duckiebot and base station with the --local flag
:align: center
:width: 90%#
Containers running on the Duckiebot and base station with the --local flag