Operation: Localization
Contents
Operation: Localization#
Default available maps:
ETH_large_loop/TTIC_large_loop
Fig. 36 ETH_large_loop#
Entity Definition#
Entity |
Description |
Num Required |
Configuration |
|---|---|---|---|
Duckies |
Rubber ducks, as pedestrians in the city/autolab |
10 |
Color: Yellow |
The Duckiebots with top plate and Apriltags. Where the AIDO submissions will be installed and run. |
3 |
DB22 |
|
Cameras in the autolab that continue to recognize Apriltags (on the ground and Duckiebots). |
6/7 |
WT19B |
|
Duckietown |
The robot that collects the transforms published from all other robots. |
1 |
DT20 |
Operation instructions#
In order to operate your autolab you need to set it up according to the following instructions:
Install
docker-composefor the desktop machine: https://docs.docker.com/compose/install/Make sure you are using a profile with the
entedistribution by running :dts profile list
Update the commands:
dts updateOn the local machine, for ALL robots (Autobot, Watchtower, Duckietown):
dts duckiebot update [HOSTNAME]
On robots, based on the robot type, create the following configs:
For ALL robots (Autobot, Watchtower, Duckietown): Replace
[MAP_NAME]with the map name for this Autolab, e.g.ETH_large_looporTTIC_large_loop:echo [MAP_NAME] > /data/config/autolab/map_name
Attention
Autobot only!
Replace
[TAG_ID]with the AprilTag ID (just the number) on top of that Autobot:echo [TAG_ID] > /data/config/autolab/tag_id
On Watchtowers only, make sure that the
dt-corecontainer is running. You can do so by running this on your desktop/laptop:dts stack up -H [HOSTNAME] core -d
Tip
Make sure the AprilTag detector is spinning and you get detection messages in
rostopic hz.On the local machine, for ALL robots (Autobot, Watchtower, Duckietown), we need the Autolab layer running as well. You can do so by running this on your desktop/laptop:
dts stack up -H [HOSTNAME] autolab -d
Note
This guide was written for the map
ETH_large_loop. Replace it with your map name every time you find it in a command.Check if you get data by cloning the repo https://github.com/duckietown/dt-autolab-localization and running the following command from its root:
dts devel build -f dts devel run -L test-tf -- --hostname ETHlargeloop
Attention
The separator
--is not a typo; the hostname is the map name without underscores, soETHlargeloopinstead ofETH_large_loop. The map name is case sensitive.You should see an output like this:
watchtower03/camera_optical_frame tag/326 watchtower03/camera_optical_frame tag/307 watchtower03/camera_optical_frame tag/326 watchtower02/camera_optical_frame tag/308 watchtower02/camera_optical_frame tag/322
Make sure you get detections from all the watchtowers. Every 10s, the autobots will publish the transform between their footprint and the AprilTag on top of them:
watchtower04/camera_opt
Another way of looking at this data is by running the following command (from the root of the same repository):
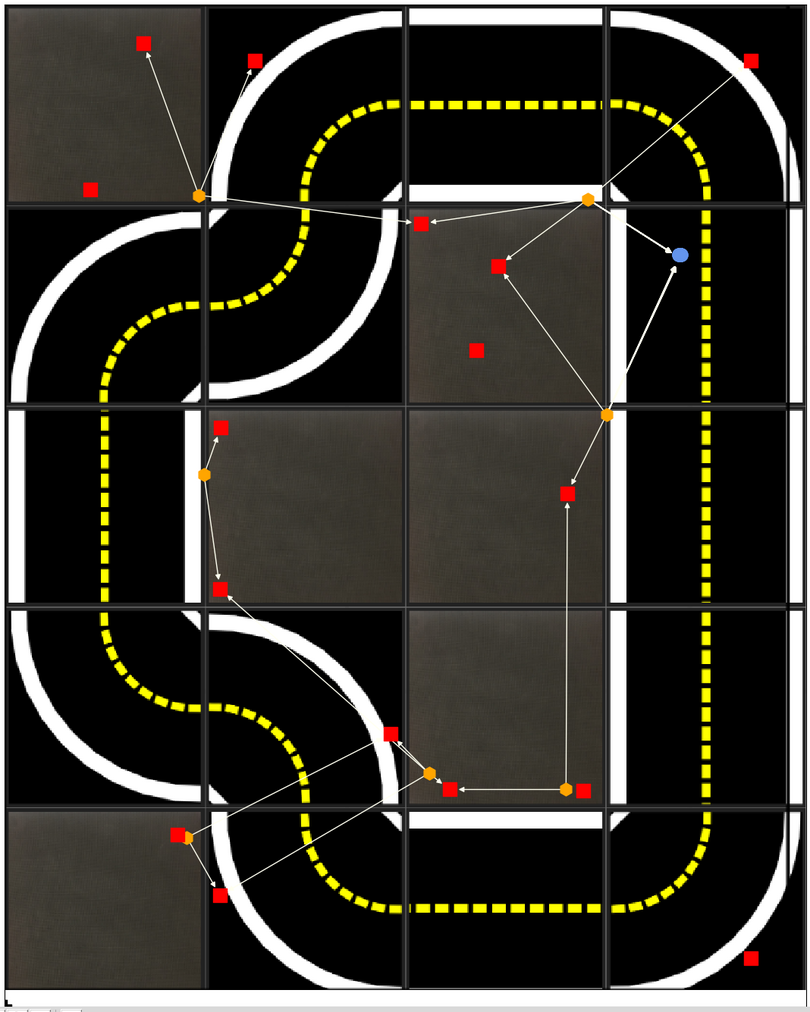
dts devel run -f -X -L single-experiment -- --hostname ETHlargeloop
This should wait 12 seconds for the observations to come in and put everything in a pose-graph that will be optimized and rendered. You should see something like this appear:
Integrate Odometry data (wheel encoders)#
In order to integrate encoder data into the localization system, you need an extra container that takes the odometry data from the robot and feeds it into the localization system.
Note
You need to run this on every Autobot.
You can run the odometry integration with the command:
dts stack up -H [HOSTNAME] encoder -d
You can test that the data is correctly received by the localization system by running the test-tf application as done above. You should see something like the following, indicating that a transformation between the reference frame footprint of the robot at different timestamps is received:
autobot01/footprint autobot01/footprint
autobot01/footprint autobot01/footprint
autobot01/footprint autobot01/footprint