Description of Components (DD24)
Contents
Description of Components (DD24)#
Most components in the Duckiedrone box are functional, i.e., the serve a purpose in learning how to or directly flying the drone. Other components are not functional, but still useful.
We provide below a brief description of each component in the box.
Raspberry Pi 4 - Model B - 4GB#
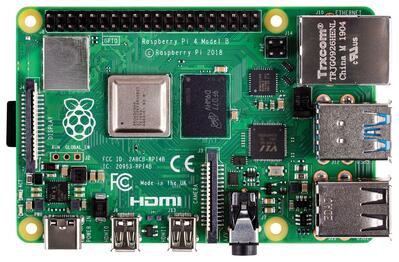
Fig. 8 Raspberry Pi 4 Model B, 4GB RAM#
The Raspberry Pi 4 - Model B is a well-known credit card-size computer. This little marvel of technology from Raspberry Pi Ltd. acts as the high-level brain of the Duckiedrone, hosting most of the computation power.
The Duckiedrone DD24 model uses the Raspberry Pi 4 - Model B, with 4GB of RAM in its standard configuration. Technical specifications are available on the Raspberry Pi website.
The Duckiedrone is compatible with the Raspberry Pi 5 too, but initialization instructions are different from the 4 version.
64GB MicroSD card - Class 10 U3#

Fig. 9 64GB Class 10 mini SD card#
The microSD card is the core memory of the Drone.
While it does look like a regular SD card with 64GB of nominal capacity, Duckietown microSD cards are “fast”, i.e., they have rather high minimum read and write speeds. Fast communication between the drone “brain” (the Raspberry Pi) and memory is needed to prevent lags in the feedback loop.
Note
The microSD card is inserted directly in the Raspberry Pi. Do not use the microSD adapter below during flight.
MicroSD to USB adapter#

Fig. 10 SD card USB adapter#
This USB-A microSD adapter is included in the box to support the first initialization of the microSD card.
One of the very first steps in the assembly process is to insert the microSD card in the adapter, and plug the adapter in your base station (laptop or desktop, not provided in the box) to install the correct software on Duckiedrone.
Warning
Do not plug the microSD card adapter in the Raspberry Pi during flight. The microSD card goes directly into the Raspberry Pi.
RPi Camera (G) with Fisheye lens and cable#

Fig. 11 Raspberry Pi camera with Fisheye lens, and cable#
The camera is an important sensor for Duckiedrone autonomous operations, allowing it to perceive the environment visually.
This is a OV5647 5MP Raspberry Pi Camera (G) with 160 degrees field of view, thanks to the included fisheye lens, and (manually) adjustable focus distance. The package includes a 30cm camera cable.
Time of flight sensors sensor#
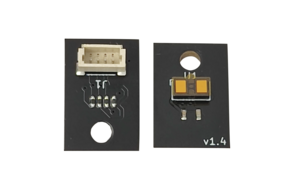
Fig. 12 Time of Flight Sensor (back, front)#
Time of flight (ToF) sensors are distance measurement sensors. The Duckiedrone mounts five, one on each side and one looking down to measure altitude. The principle of operation is the measurement of the return time of light bouncing off obstacles, so we can think of them as 1D lidars.
The Duckiedrone ToFs mount the VL53L1X module (VL53L1X specifications) and come with 15cm, and 23cm 4-pin JST 1.5mm cables.
Motors (CW)#

Fig. 13 Brushless DC Motors (Clockwise - CW)#
The Duckiedrone (DD24) mounts four brushless DC motors, model DX2205, featuring a motor constant of 2300KV, a M5 shaft diameter, M3 mounting holes and a weight of roughly 28g each.
Note that there are two pairs of motors, distinguishable by the color of the top nut.
Note
Black nuts are for motors that spin in the clockwise (CW) direction.
If you try to unscrew the top nuts, you will notice how they have opposite threads. This is to prevent the nuts coming off (along with the propellers) during flight.
Motors (CCW)#

Fig. 14 Brushless DC Motors (Counter-clockwise - CCW)#
These motors are the same model as the Motors (CW), but are designed for spinning in a counter-clockwise direction.
Note
Red nuts are for motors that spin in the counter-clockwise (CCW) direction.
Propellers (CW and CCW)#

Fig. 15 Propellers (CW and CCW)#
The Duckiedrone (DD24) mounts four Diatone Polycarbonate 4040, 4x4 (in) three-bladed propellers (“props”), each weighing 3.5g.
The box contains a full spare set, i.e., 4x CW and 4x CCW props.
As for the motors, it is important to note that one set of these propellers is designed for clockwise (CW) motor operations, while the other for counter-clockwise (CCW).
To distinguish CW from CCW propellers, find the arrows impressed on the backside, as show in Propellers (CW and CCW).
Battery#

Fig. 16 The Duckiedrone battery#
The battery provides power for the Duckiedrone to operate, and is therefore essential to autonomous operations.
The Duckiedrone battery is a Lithium-Ion Polymer (LiPo) battery (LiPo basics on Wikipedia) with the following technical specifications:
Cells: 4
Output Voltage: 14.8V
Capacity: 1500mAh
Discharge Rating: 35C
Weight: 178g
Dimensions: 76x35x33mm
Here is a good external guide to learn about what each number means: Rogers Hobby Center LiPo Guide.
Attention
Before doing anything with the Duckietown battery, ready the Duckietown Safety Guidelines.
Warning
Lithium-Ion batteries are fire hazards and must be handled with care.
If for any reason your battery looks punctured or otherwise damaged, do not use it and dispose of it immediately.
You can learn how to safely dispose of a LiPo battery, e.g., here: Oscar Liang’s Guide on Disposing LiPo batteries.
The Duckietown battery connects to the drone through a 10cm long XT60 connector, and should be charged using the provided battery charger.
Battery charger#

Fig. 17 Lithium Ion battery charger#
This battery charger provides a safe charging interface for the LiPo battery. It connects on one side to teh battery, and the other to a stable power source (e.g., a wall outlet) through the battery charge adapter.
Operating Voltage Range: 9V-16V DC
Cells Type Supported: 2-4 cells Li- Ion/Li-Poly
Max Charge Power: 25W
Charge Current: 1500mA
Charge Accuracy: ±10mV
Balance Current: 1000mA
Material: Metal Case & Voltage Display
Battery charger adapter - 12V 2A US plug#

Fig. 18 Duckiedrone battery charger adapter (12V, 2A)#
This 12V 2A power adapter, provided with a US wall plug, connects to the battery charger to deliver charge to the battery when needed.
Duckietown drone HUT - v1.2#

Fig. 19 The Duckiedrone HUT connects the Duckiedrone embedded systems to the Raspberry Pi, and provides a playground for circuit testing.#
The Duckiedrone HUT (yes, HUT, not HAT..) is a board that acts as hub for connections between the various peripherals of the drone, such as sensors and flight controller, and the onboard Raspberry Pi.
It supports the placing of a breadboard to provide a “playground” for additional prototyping or pedagogical experiences, such as adding status LEDs.
Breadboard - Yellow, 45x35mm#
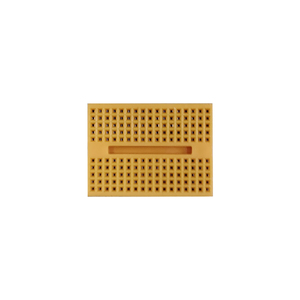
Fig. 20 Duckiedrone Duckiehut breadboard#
This is a prototyping breadboard with two-sided tape on the back. Attach it in the appropriate empty region on the top of the Duckiehut. To learn more about how to use breadboards check, e.g., the Breadboard Wikipedia page.
Flight Controller & ESC stack#
Note
There are two supported flight‑controller + ESC stacks for the Duckiedrone family.
SpeedyBee F405 V3/V4 (50 A/55 A) – shipped with the first (DD24) revision kits.
Mamba F405 MK2 V2 (50 A) – shipped with the second (DD24‑B) revision kits.
Both boards share similar functionalities and are fully compatible with the assembly and configuration instructions in this manual.
Before starting the assembly of your Duckiedrone, make sure to identify which flight controller is in your box, as the assembly instructions are slightly different.

Fig. 21 The flight controller (FC) and electronic speed controllers (ESC) stack#
The flight controller (FC) and Electronic Speed Controller (ESC) - foreword#
The Flight controller (FC) is the low-level brain of the Duckiedrone, tasked with transforming high-level decisions, e.g., “go faster”, into actual commands to the motors. The FC moreover hosts sensors such as the Inertial Measurement Unit (IMU), which measure linear and angular accelerations at high frequency (~200Hz), and a barometer, which indirectly measures height through variations in atmospheric pressure.
Overall, the FC is an essential component of every drone, even when another computational unit is available onboard (e.g., the Raspberry Pi, as in the case of teh Duckiedrone). This is because the dynamics of a drone are much faster than the capability of a Raspberry Pi to deliver commands, e.g., to exercises route corrections, especially when the Raspberry Pi is tasked with many other processes as well, as, e.g., visual perception.
The Electronic Speed Controller board, that stacks with the FC and is conveniently included in this same box, transforms speed signals for the motors from the FC into lower-level (PWM) signals that make the motors spin.
This FC+ESC stack includes the power distribution circuitry as well, receiving power directly from the battery through an XT60 connector and appropriately regulating (adjusting voltage output and stability) it before providing it to various peripherals.
FCs on the DD24 and DD24‑B#
The standard DD24 is supplied with the SpeedyBee stack, whereas the DD24‑B revision uses the Mamba stack.
Note
The model of the FC+ESC stack provided in the box has been upgraded from version F405 V3 50A to F405 V4 55A in April 2025.
The DD24 uses a SpeedyBee F405 V3 50A, with details provided in The FC+ESC F405 V3 stack box components and specifications.
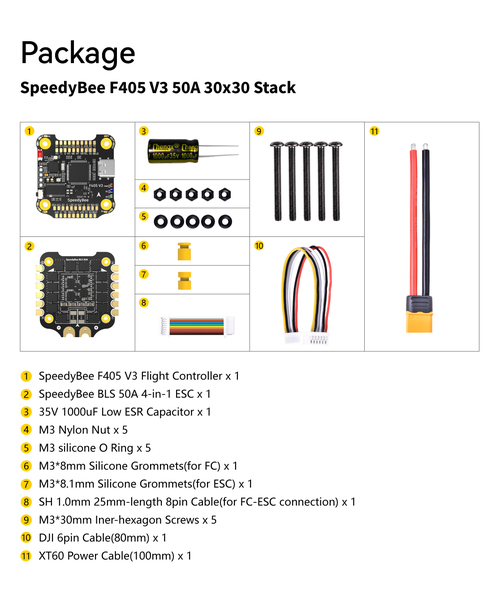
Fig. 22 The FC+ESC F405 V3 stack box components and specifications#
Identifying your flight controller#
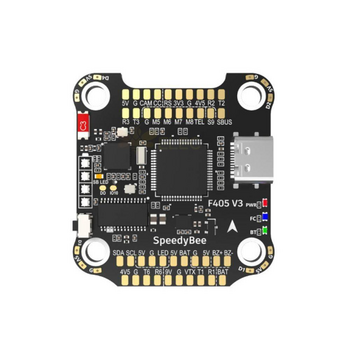
Fig. 23 SpeedyBee F405 V3/V4 (top view)#

Fig. 24 Mamba F405 MK2 V2 (top view)#
Use the connector layout and the soldering pads type to recognize your board:
SpeedyBee – only surface soldering pads.
Mamba – through-hole soldering pads.
Attention
If your Duckiedrone box has a SpeedyBee flight controller, follow these Duckiedrone DD24 assembly instructions
If your Duckiedrone box has a Mamba flight controller, follow these Duckiedrone DD24-B assembly instructions
Buzzer#

Fig. 25 The buzzer notifies the user when the battery voltage is lower than a certain threshold#
The Duckiedrone box includes a buzzer. Buzzers emit loud noises when the measure output battery voltage is less than a certain threshold, indicating that the battery is about to be completely discharged. It is a good idea to land the drone when hearing the buzzer buzz.
Cables#

Fig. 26 Duckiedrone cables#
The Duckiedrone (DD24) box includes:
1x USB-A to USB-C cable (with data) - 23cm + length of connectors, angled: FC to Raspberry Pi connection
1x USB-C power cable (power only) - 8cm wires + 1cm exposed sire + 2cm connector, exposed wires: FC to Raspberry Pi connection
4x 4-pin JST 1.5mm connectors (both ends) - 15cm: ToF sensor to HUT connections
1x 4-pin JST 1.5mm connectors (both ends) - 23cm: ToF sensor to HUT connection
Heat sink kit#

Fig. 27 Heat sinks mount on the Raspberry Pi and help dissipate heat and lower the temperature of the board#
Heat sinks are simple passive convective elements that stick to specific locations on the Raspberry Pi. Heat sinks help reduce the temperature of the Raspberry Pi preventing it from automatically going in protection mode and partially shutting down computational resources.
Fan#

Fig. 28 PWM fan for Raspberry Pi temperature control#
This fan is used to cool down the Raspberry Pi. It is a PWM fan, meaning the speed at which it spins can be controlled.
PWM speed control, 3-pin Dupont connectors
Size: 40x40x10mm
85mm long cables
Header jumpers - 2.54mm spacing, black#

Fig. 29 Jumper for Wi-Fi mode manual toggling#
This 2.54mm jumper is used to short (i.e., connect) pins on the HUT. This is useful, e.g., to activate different Wi-Fi modes.
Velcro strips#

Fig. 30 Velcro strips#
Velcro strips are use for cable management and securing components, such as the battery, to the drone’s chassis. The Duckiedrone box contains:
2x 25cm black Velcro strips
Chassis#
The Duckiedrone’s chassis is a custom designed 2.5mm thick carbon fiber sandwich-design chassis, with the following components.
Bottom Plate#

Fig. 31 Duckiedrone chassis: bottom plate#
The bottom part of the chassis provide the main surface for mounting components, such as the motors, the electronics, the battery and more.
The chassis has a square design with each side measuring 27.2cm.
Top Plate#

Fig. 32 Duckiedrone chassis: top plate#
The top chassis plate has the same outer dimension of the bottom plate (27.2cm side), and its main function is to provide structural stability to the drone.
Other chassis components#
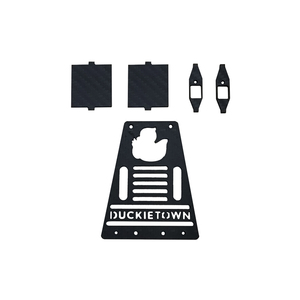
Fig. 33 Duckiedrone chassis: other components#
Other chassis components include:
2x ToF sensor vertical supports: for mounting side viewing ToF sensors
2x Fan duct walls: to improve thermal control efficiency of the fan
1x Battery support plate: to hold the battery.
Camera mount with ToF sensor support#

Fig. 34 Camera mount with integrated time of flight sensor mounting support#
This chassis component mounts on the bottom plate and is used to hold the Duckiedrone’s camera and front-facing ToF sensor. It places the camera at a 60 degrees angle. Coupled with the camera’s 160 degrees field of view, it allows the drone to see both underneath and in front at the same time.

Landing Pads#
Fig. 36 Rubber landing pads#
These rubber landing pads mount under the landing gears and provide a softer landing experience.
Bits and Pieces (Screws, nuts, standoffs)#

Fig. 37 Screws, nuts and standoffs#
To Duckiedrone box includes the following a host of “bit and pieces”, including spares of each:
Screws (number + spares)
(22+2)x Nylon (M3x6) - 16x chassis, 2x securing battery, 4x forward battery supports
(3+1)x Nylon (M3x10) - 3x camera mount
(16+2)x Metal (M3x14) - 16x motors + landing gears
(4+1)x Metal (M3x20) - 4x FC
(11+2)x Nylon (M2.5x8) - 4x HUT, 5x ToF sensors, 2x aft battery supports, 2x Raspberry Pi stack
(6+1)x Nylon (M2x10) - 4x camera, 2x buzzer
Nuts
(5+1)x Nylon (M2.5) - 5x ToF sensors
(6+1)x Nylon (M2) - 4x camera, 2x buzzer
(5+1)x Nylon (M3) - 2x securing battery, 3x camera mount
Standoffs
(2+1)x Nylon (M2.5x40+6 MF) - 2x battery plate and Raspberry Pi standoffs
(4+1)x Nylon (M2.5x20+6 MF) - 4x Raspberry Pi and bottom plate
(4+1)x Nylon (M2.5x15+6 FF) - 4x Raspberry Pi and HUT
(8+2)x Nylon (M3x35+6 FF) - 8x chassis
(2+1)x Nylon (M3x40+6 FF) - 2x forward battery supports
(2+1)x Nylon (M3x6+6 MF) - 2x fan
Wrench#

Fig. 38 Wrench (8mm) for tightening motor top nuts#
This 8mm wrench is provided to tighten up the motor-prop nuts. We really do not want those to go off while flying.
Screwdriver - Cross#

Fig. 39 Cross screwdriver#
This simple Philips screwdriver drives all the screws in the box.
Camera Calibration pattern#
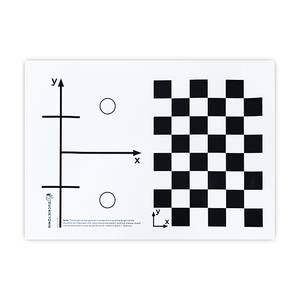
Fig. 40 Duckiedrone (and Duckiebot) camera calibration pattern#
This checkerboard pattern is used to calibrate the Duckiedrone camera.
Rubber Duckies#
Fig. 41 Duckietown duckies#
Duckietown duckies are non functional yet essential to the operations of the Duckiedrone. Make sure to always have at least one duckie onboard.
Duckietown Stickers#
Fig. 42 Dcukeitown stickers#
Duckietown stickers look great on your laptop, and notify others of your Duckietown training.
Duckiedrone instruction card#

Fig. 43 Duckiedrone DD24 instruction card#
This instructions card provides links to the Duckietown website and the Duckietown get started page.