Drivers
Contents
Drivers#
{"description": "Virtual Duckietown robot drivers.", "keywords": "Duckietown, Duckiematrix, virtual, robot, drivers"}
This section describes virtual Duckietown robot drivers.
What you will need
Completed Virtual Duckietown Robots.
What you will get
Knowledge on virtual Duckietown robot drivers.
Introduction#
Virtual Duckietown robot drivers allow for the communication between a Duckietown robot’s ROS stack and an entity inside the Duckiematrix.
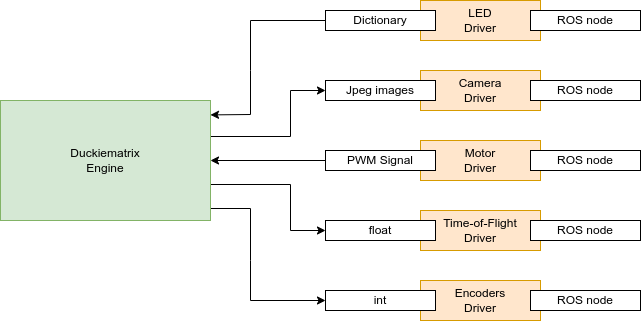
Fig. 8 Data types exchanged with the Duckiematrix by the virtual Duckietown robot drivers.#
Implementation status#
Driver |
Implemented |
|---|---|
Camera |
Yes |
Time-of-Flight |
Yes |
IMU |
Yes |
LED |
Yes |
Encoder |
Yes |
Wheel |
Yes |