Architecture
Contents
Architecture#
This chapter describes the Duckiematrix’s architecture.
What you will need
Nothing.
What you will get
Knowledge on the Duckiematrix’s architecture.
Introduction#
An instance of the Duckiematrix requires:
An
Engine.A
Renderer.
The Engine#
The Engine is responsible for reading a Map, scripts and assets from disk, and sending them all together, in a single compressed package known as the Context, to the Renderers connected to that Engine. The Context is composed of the components a Renderer requires to initialize a Map.
Note
It is enough for the Renderers to place the correct objects in their initial states.
The Renderer#
The Renderer is responsible for rendering the content of the Context and simulating Duckietown robot sensors.
Note
While the Engine only requires a terminal, the Renderer has a GUI (Graphical User Interface) component, which requires a screen.
However, this is not a strict limitation, as it is possible to run a Renderer using off-screen rendering, where a memory buffer serves as a virtual screen.
Networks#
A Network is defined as an Engine and set of Renderers connected to that Engine.
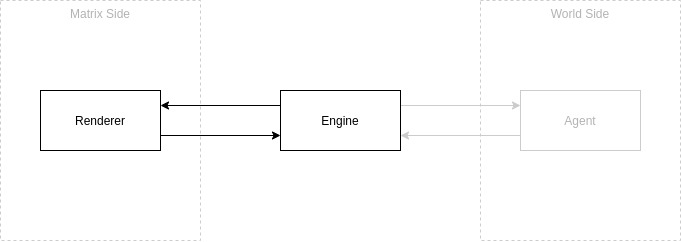
Fig. 2 A block diagram of a simple Network.#
Note
While you can only have a single Engine per instance of the Duckiematrix, you can have multiple Renderers connected to the same Engine.
How it works#
Renderers are essentially static video games, in which a virtual environment is shown but nothing happens, until the Engine unfreezes everything for a short period of time, known as a time step.
The Engine is responsible for processing time steps as fast as possible, where for each time step, the Engine computes the physics of the objects in the scene, regulates when sensors should fire and lights should turn on/off, etc.
Changes from one time step to the next are represented as diffs (differences) in the content of the Map Layers that describe the scene. At every time step, diffs are sent to the Renderers, which in turn apply them to their scenes.