Sides
Contents
Sides#
This chapter describes the Duckiematrix’s sides.
Introduction#
An instance of the Duckiematrix has two sides:
The
Matrixside.The
Worldside.
The Matrix side#
The Matrix side contains all of the Renderers.
Note
When something is said to happen on the Matrix side, it means that it is something that is computed, or an event that occurs, in one or more Renderers.
The World side#
The World side is where we (human) users and robots reside.
Any World entity (e.g., user, algorithm, robot, etc.) that interacts with the Engine from the World side is known as an Agent.
Note
We are not making a distinction between physical and virtual robots here.
Robots, intended as computing entities, whether physical or virtual, always reside on the World side. Their sensors and actuators though, reside on the Matrix side.
The Engine has no side#
Sitting between the World and Matrix sides, the Engine does not belong to either.
In a Network, the Engine is responsible for, among other things, bridging data between the two sides, ensuring that each side gets what it needs from the other.
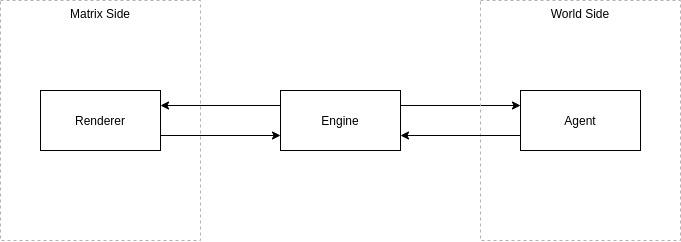
Fig. 3 A block diagram of a simple Network.#