Operation - Use the Dashboard
Contents
Operation - Use the Dashboard#
This section describes how to use the Dashboard.
To open the Dashboard, run:
dts duckiebot dashboard ![DUCKIEBOT_NAME]
To open a specific page on the Dashboard, run the following command, where ![PAGE] is the page (e.g., robot/mission_control):
dts duckiebot dashboard ![DUCKIEBOT_NAME] --page ![PAGE]
Pages#
Once logged in, you will see a navigation panel on the left side of the Dashboard.
Note the pages in the table below.
Page |
Description |
|---|---|
File Manager |
A tool for managing the files on a Duckiebot |
Portainer |
A tool for managing the containers on a Duckiebot |
Robot |
Provides information about the status of a Duckiebot |
Users |
Allow multiple accounts to use one Duckiebot |
Profile |
Provides information about a Duckietown account |
Package Store |
Provides available packages for a Duckiebot |
Settings |
Allows the configuration of the |
Robot#
On this page, you can find several tabs related to your Duckiebot.
Info#
In this tab, you can find information about your Duckiebot, including its name, type, configuration, CPU usage, temperature, etc.
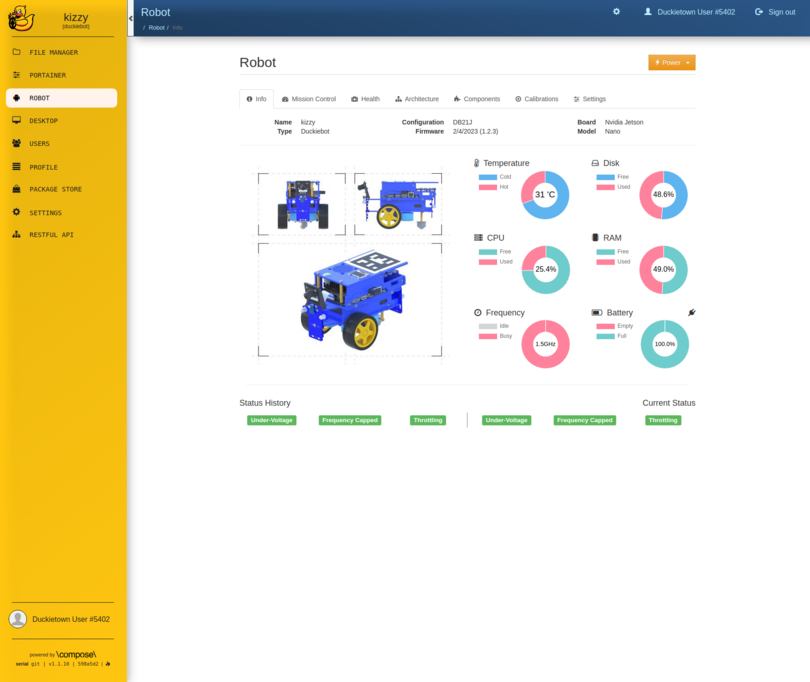
Fig. 41 The Info tab on the Robot page of the Dashboard.#
Note
In this tab, you can find your Duckiebot’s firmware version.
Mission Control#
In this tab, you can see what your Duckiebot sees, its lateral and angular speed, and a plot of its left and right motor speeds.
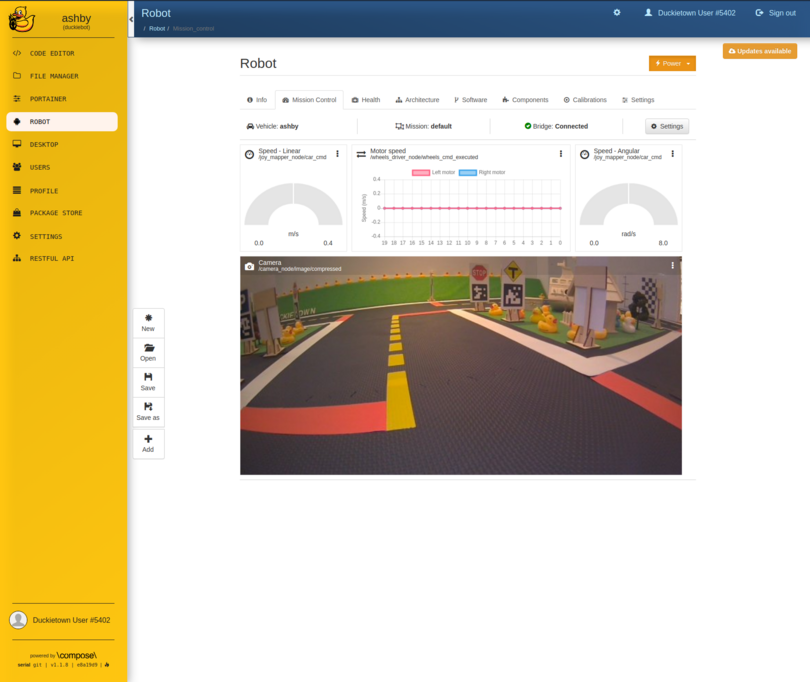
Fig. 42 The Mission Control tab on the Robot page of the Dashboard.#
Health#
In this tab, you can see a plot of your Duckiebot’s temperature, frequency and CPU usage.
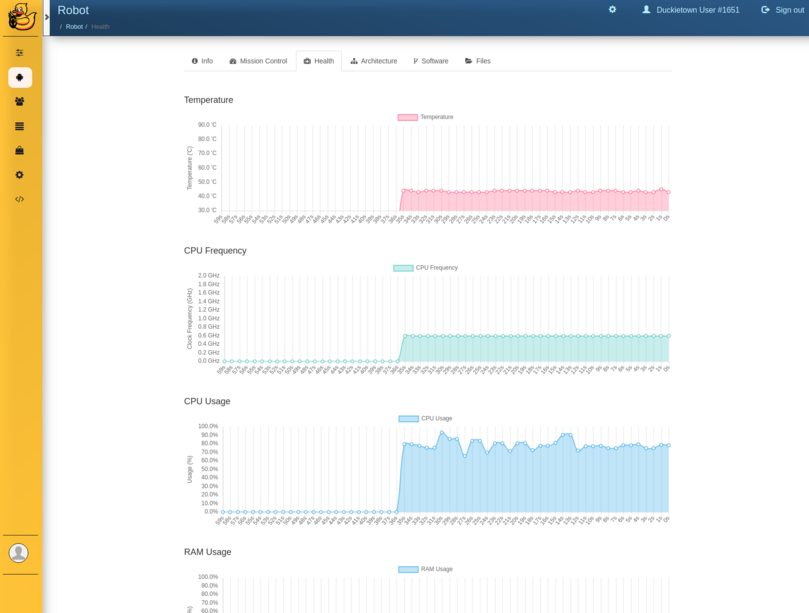
Fig. 43 The Health tab on the Robot page of the Dashboard.#
Architecture#
In this tab, you can see the a graphical representation of the ROS network on your Duckiebot.
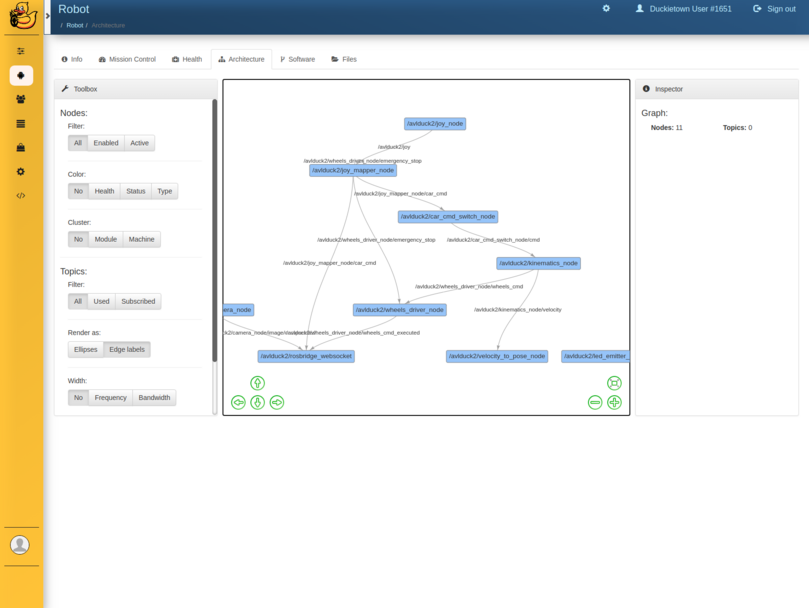
Fig. 44 The Architecture tab on the Robot page of the Dashboard.#
Portainer#
On this page, you can manage the containers on your Duckiebot.
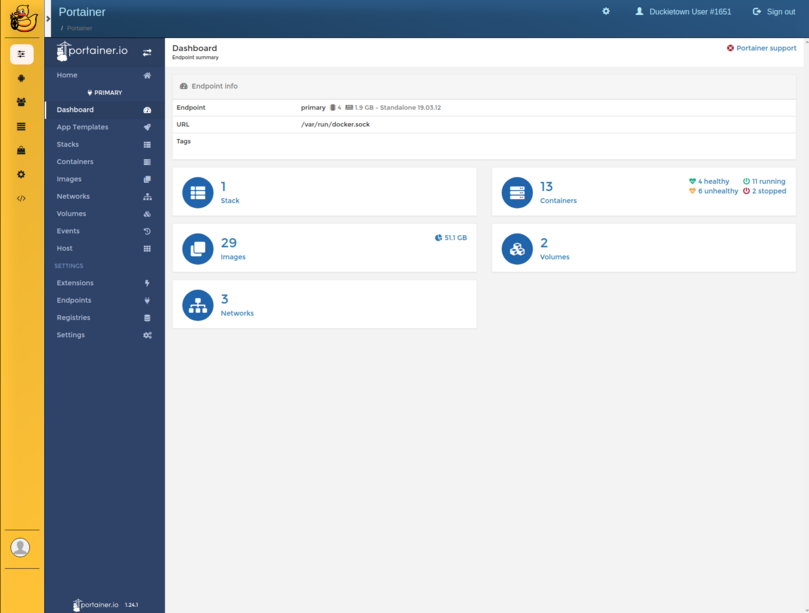
Fig. 45 The Portainer page of the Dashboard.#