Faster Development Workflow
Contents
Faster Development Workflow#
In this section, some tricks for a much faster development workflow using dts are presented.
Run locally#
As demonstrated previously, it is possible to add new code to a DTProject or modify existing code and then build and run either locally or directly on a Duckiebot. While working with ROS, examples so far have executed all nodes on the Duckiebot.
This is because ROS configures nodes to default to the ROS network on the local machine, and given that the ROS network originates on the Duckiebot, this default configuration can be leveraged by running the nodes directly on the Duckiebot.
However, building and running on the Duckiebot is not optimal for speed, and a responsive development workflow is crucial.
There are two major issues with the current workflow:
The source code resides on the local computer, so Docker must transfer it to the Duckiebot to build the image.
The Duckiebot’s on-board computer is too slow to serve as a rapid development testbed.
Ideally, it should be possible to build and run ROS nodes on the local computer in a manner transparent to all other ROS nodes. This can be achieved easily with
dts.
Consider the example in ROS Subscriber. A block diagram showing the ROS nodes and their location in the network would be as follows:
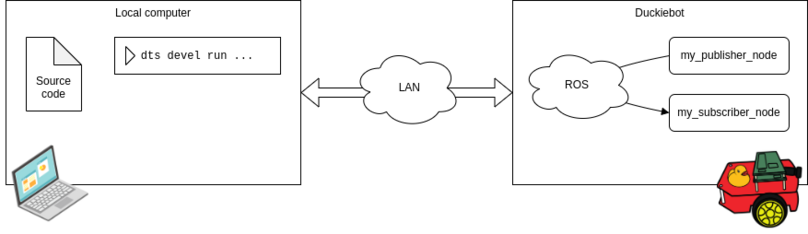
Fig. 8 Block diagram for a Pub-Sub setup with both nodes running on the Duckiebot.#
Now, maintain everything as is for the Publisher and adjust the build and run commands for the Subscriber as follows:
dts devel build -f
dts devel run -R ROBOT_NAME -L my-subscriber
Here, dts is instructed to build the project locally (omitting -H ROBOT_NAME) and to run the subscriber node locally (omitting -H ROBOT_NAME) while connecting it to the Duckiebot’s ROS network using the --ros (-R) option.
A block diagram showing the new configuration of ROS nodes and their location in the network would be:
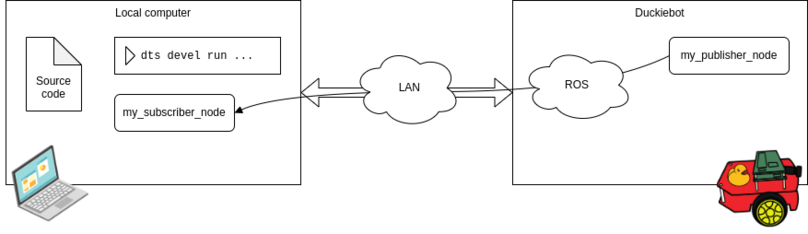
Fig. 9 Block diagram for a Pub-Sub setup with the Subscriber node running on the local computer.#