Reference frames
Contents
{"description": "Understand the different reference frames used by ROS and BetaFlight in the Duckiedrone (DD24) system, including REP 105 and REP 103 conventions.", "keywords": "Duckiedrone reference frames, ROS REP 105, REP 103, BetaFlight reference frame, DD24 coordinate systems, robotics frames, PX4 documentation"}
Reference frames#
Different reference frames are used by ROS and BetaFlight (i.e. by the software running on the Raspberry Pi and the one on the flight controller respectively).
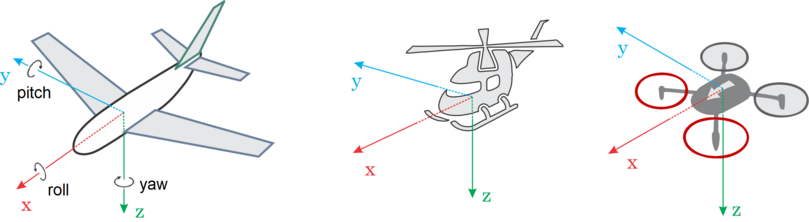
Betaflight#
The reference frame used by the BetaFlight firmware is as following1:
Robotic Operating System (ROS)#
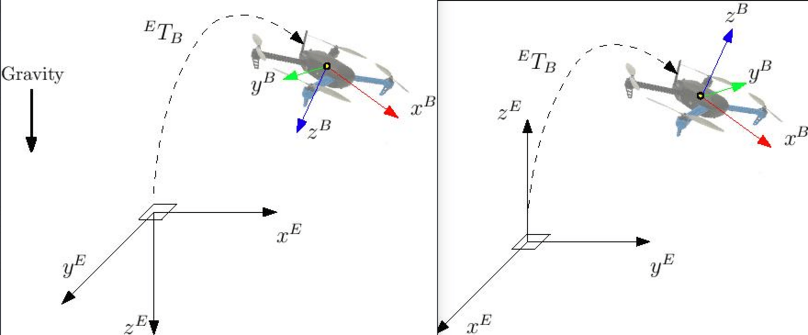
ROS uses the reference frames conventions defined in REP 105. Specifically for mobile robots (and thus the Duckiedrone) the preferred axis orientation is defined in REP 103 as having the body axis as:
xforwardyleftzup.
In the image below 1 you can see a comparison between the two reference frame conventions.