Virtual Drivers
Contents
Virtual Drivers#
Virtual drivers allow for the communication between a Duckietown robot’s ROS stack and an entity in the Duckiematrix.
Implementation status#
Driver |
Working |
Limitations |
|---|---|---|
Camera |
Yes |
|
Time of Flight |
No |
|
IMU |
No |
|
LED |
Yes |
|
Encoders |
No |
|
Wheels |
Partially |
The wrong speed is achieved |
Display |
Broken |
Virtual Drivers I/O Diagram#
Fig. 9 shows what type of data each of the drivers receives or sends to the Duckiematrix. The interfaces are developed using the Python SDK.
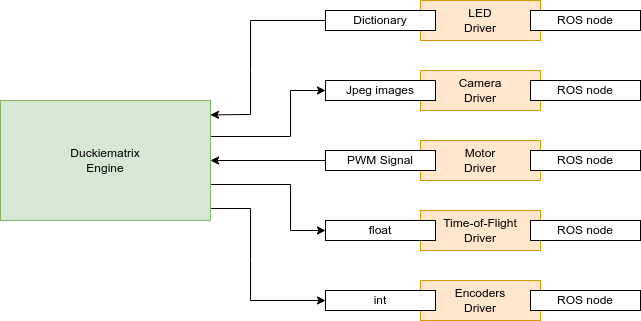
Fig. 9 Data types exchanged with the Duckiematrix by the virtual drivers.#