Additional Software Tools
Contents
Additional Software Tools#
This chapter describes additional software tools.
What you will need
Completed Duckiebot Dashboard.
What you will get
Knowledge on additional software tools.
GUI tools#
To open a terminal with access to your Duckiebot’s ROS network, run:
dts gui DUCKIEBOT_NAME
Note
Only a single instance of the start_gui_tools container can exist on your computer at a time. If multiple terminal instances are required, use noVNC.
noVNC#
To open a desktop environment connected to your Duckiebot, run:
dts gui --vnc DUCKIEBOT_NAME
To open a terminal within this desktop environment, click the Terminal desktop icon.
ROS#
Note
The following requires a terminal with access to your Duckiebot’s ROS network.
How to see a list of topics#
To see a list of topics, run:
rostopic list
Note
The following topics should be present:
/DUCKIEBOT_NAME/camera_node/camera_info
/DUCKIEBOT_NAME/camera_node/image/compressed
/rosout
/rosout_agg
How to see the publishing frequency for a topic#
To see the publishing frequency for a topic, run the following command, where TOPIC is the topic (e.g., /DUCKIEBOT_NAME/camera_node/image/compressed):
rostopic hz TOPIC
Note
For a Raspberry Pi 3, you should see a publishing frequency of around 30 Hz for the /DUCKIEBOT_NAME/camera_node/image/compressed topic:
average rate: 30.016
min: 0.026s max: 0.045s std dev: 0.00190s window: 841
To stop rostopic hz TOPIC, press Ctrl+C.
How to see messages being sent to a topic#
To see messages being sent to a topic, run the following command, where TOPIC is the topic (e.g., /DUCKIEBOT_NAME/camera_node/image/compressed):
rostopic echo TOPIC
Note
For the /DUCKIEBOT_NAME/camera_node/image/compressed topic, you should see a large sequence of numbers being printed to your terminal.
How to see what your Duckiebot sees#
To see what your Duckiebot sees, run the following command and select the /DUCKIEBOT_NAME/camera_node/image/compressed topic from the drop-down menu:
rqt_image_view
Note
If you are using noVNC, you can also click the RQT Image View desktop icon.
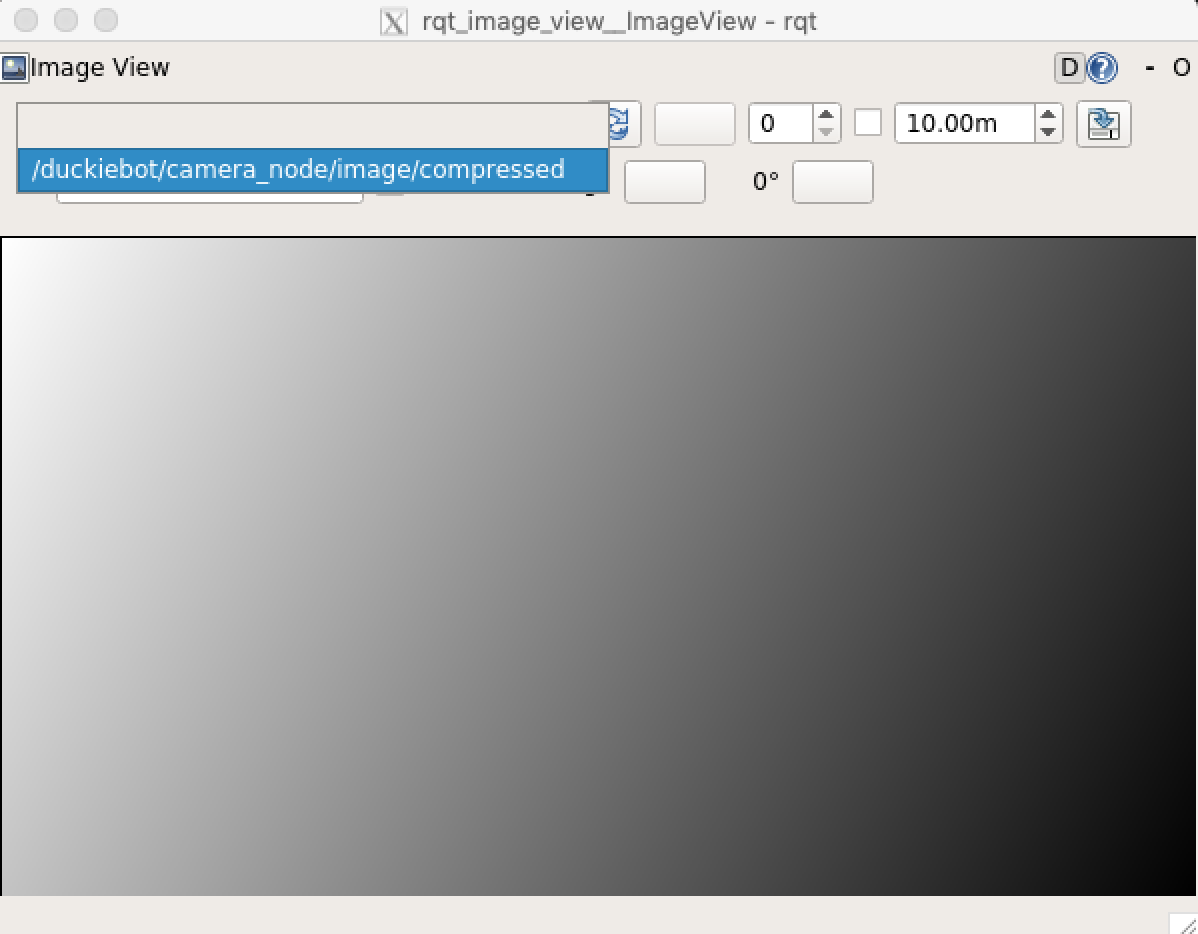
Fig. 48 The rqt_image_view window with the /DUCKIEBOT_NAME/camera_node/image/compressed topic dropdown menu option shown.#
How to see a graphical representation of your Duckiebot’s ROS network#
To see a graphical representation of your Duckiebot’s ROS network, run:
rqt_graph
Troubleshooting#
Troubleshooting
SYMPTOM
My ROS commands are not working and I cannot use Tab to autocomplete any ROS commands.
RESOLUTION
Run:
source /code/catkin_ws/devel/setup.bash
Troubleshooting
SYMPTOM
I cannot connect to my Duckiebot’s ROS Master.
RESOLUTION
Run the following command and make sure that the ROS, car-interface and duckiebot-interface containers are running:
dts duckiebot dashboard DUCKIEBOT_NAME --page portainer