LX: Kinematics and Odometry
Contents
LX: Kinematics and Odometry#
What you will need
Learning experience computer setup: General Procedure for Running Learning Experiences
(reccomended) A successful Duckiematrix installation: Duckiematrix installation
(optional) A “Ready to Go” Duckiebot: Getting Started with your Duckiebot
(optional) familiarity with ROS basics: LX: ROS basics
What you will get
Running the kinematics and odometry learning experience.
This page describes how to run the “Kinematics and Odometry” learning experience.
Warning
If you are using a Duckietown Workspace, Duckietown Viewer apps and Duckiematrix renderer-only commands such as dts matrix run must be run from a local terminal outside the dev container. The --standalone flag starts both the Engine and Renderer in the same environment.
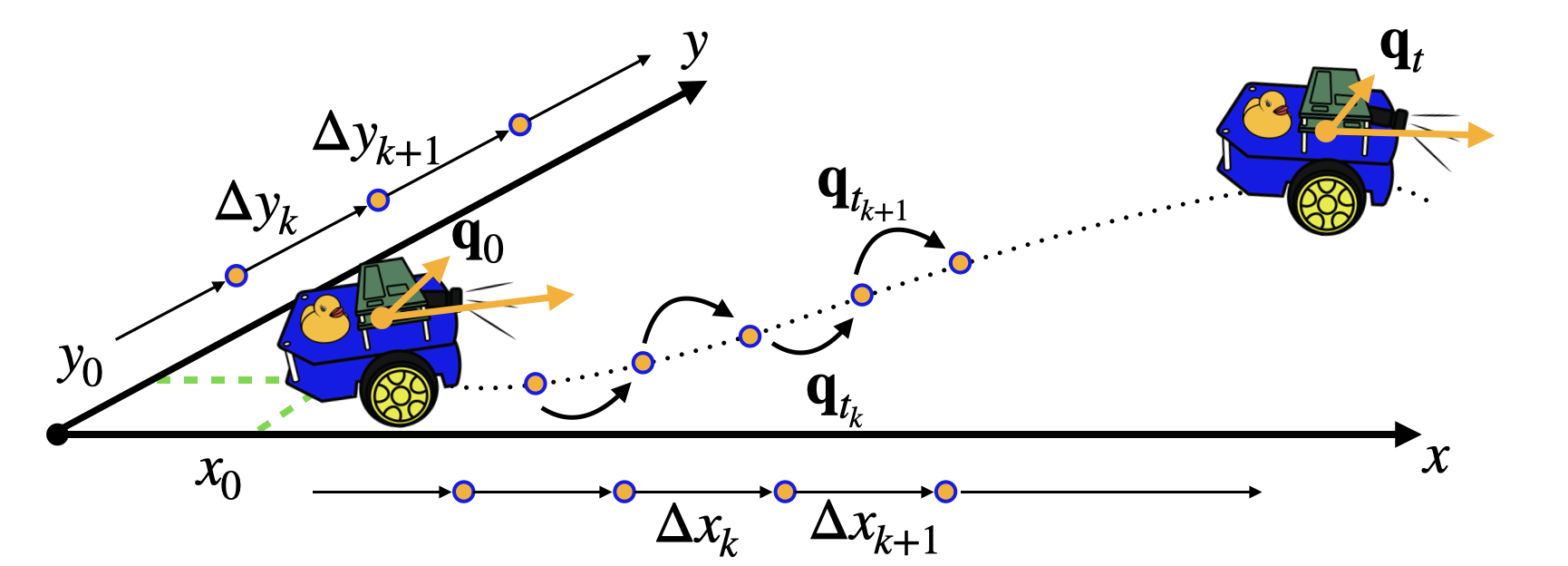
Fig. 151 Welcome to the Kinematics and Odometry LX!#
For guided setup instructions, lecture content, and more related to this LX, see our Self-Driving Cars with Duckietown MOOC on EdX.
Intended Learning Outcomes
In this learning experience, learners will:
appreciate the importance of representations in robotics, in particular what is a robot state
be able to formalize and explain the concept of pose in SE(2) and SE(3)
practice defining and implementing poses in given reference frames
learn how to convert poses in a reference frame to another one
read data from wheel encoders of physical or virtual Duckiebots, and familiarize with the message type
code and implement a simple ROS node to extract wheel encoder data and manipulate it
design and implement a dead reckoning estimator to reconstruct the pose of a differential drive robot from wheel encoder measurements (odometry)
be able to articulate the strengths and shortcomings of this dead rekoning estimator
perform odometry calibration procedures for physical Duckiebots
use more advanced ROS tools (
rosservice,rosparameter)
Note
This exercise can be run on a real Duckiebot or on a virtual Duckiebot in the Duckiematrix.
Forking the repository#
1. Create a fork#
Navigate to the Modeling and Kinematics LX repository.
Find and press the “Fork” button on the top right:
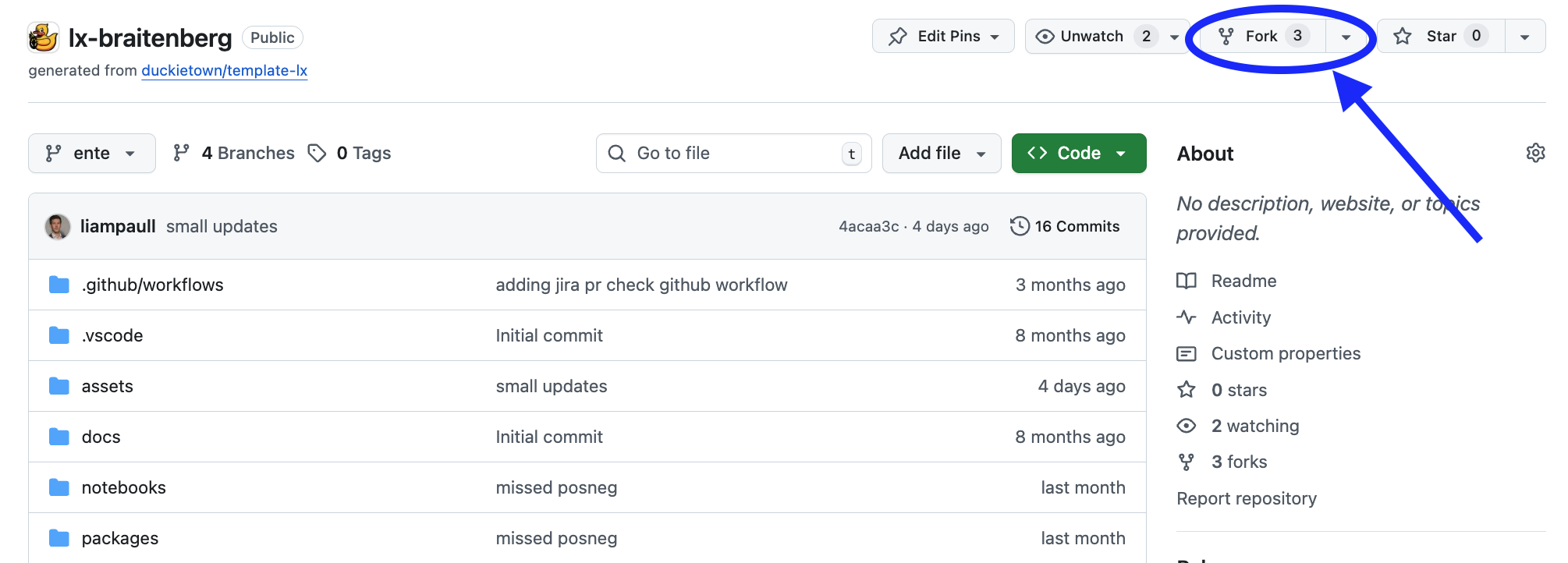
Fig. 152 Fork the LX to be able to make local changes while still being able to receive updates.#
This will create a new repository at: <your_github_username>/lx-kinematics-odometry.
2. Clone the fork#
Clone the fork on your computer, replacing your GitHub username in the command below, and navigate to the new folder:
git clone [email protected]:<your_github_username>/lx-kinematics-odometry
cd lx-kinematics-odometry
3. Configure upstream repository#
Configure the Duckietown version of this repository as the upstream repository to synchronize with your fork.
List the current remote repository for your fork,
git remote -v
Specify a new remote upstream repository,
git remote add upstream https://github.com/duckietown/lx-kinematics-odometry
Confirm that the new upstream repository was added to the list,
git remote -v
You can now push your work to your own repository using the standard GitHub workflow, and the beginning of every exercise will prompt you to pull from the upstream repository, updating your exercises to the latest version (if available).
Keeping your System Up To Date#
💻 These instructions are for
entelearning experiences. Ensure your Duckietown Shell is set to anenteprofile (and not adaffyone). You can check your current profile with:dts profile list
To switch to an ente profile, follow the Duckietown Manual DTS installation instructions.
💻 Pull from the upstream remote to synch your fork with the upstream repo:
git pull upstream ente
💻 Make sure your Duckietown Shell is updated to the latest version:
pipx upgrade duckietown-shell
💻 Update the shell commands:
dts update
💻 Update your laptop/desktop:
dts desktop update
🚙 Update your Duckiebot:
dts duckiebot update ROBOTNAME
(where
ROBOTNAMEis the name of your Duckiebot - real or virtual.)
Launching the Code Editor#
Important
All dts code commands should be executed inside the root directory of the learning experience.
Making sure you are inside the path of the specific learning experience you want to work on, open the code editor by running:
dts code editor
Wait for a URL to appear on the terminal, then click on it or copy-paste it in the address bar of your browser to access the code editor. The first thing you will see in the code editor are a version of these instructions. At this point you can start following the LX-specific indications shown in your code editor.
Walkthrough of Notebooks#
Inside the code editor, use the navigator sidebar on the left-hand side to navigate to the
notebooks directory and open the first notebook.
Follow the instructions on the notebook and work through them in sequence.
In many cases the last notebook will instruct you to write some code inside the learning experience directory.
Once you have done that you will need to build your code before testing it.
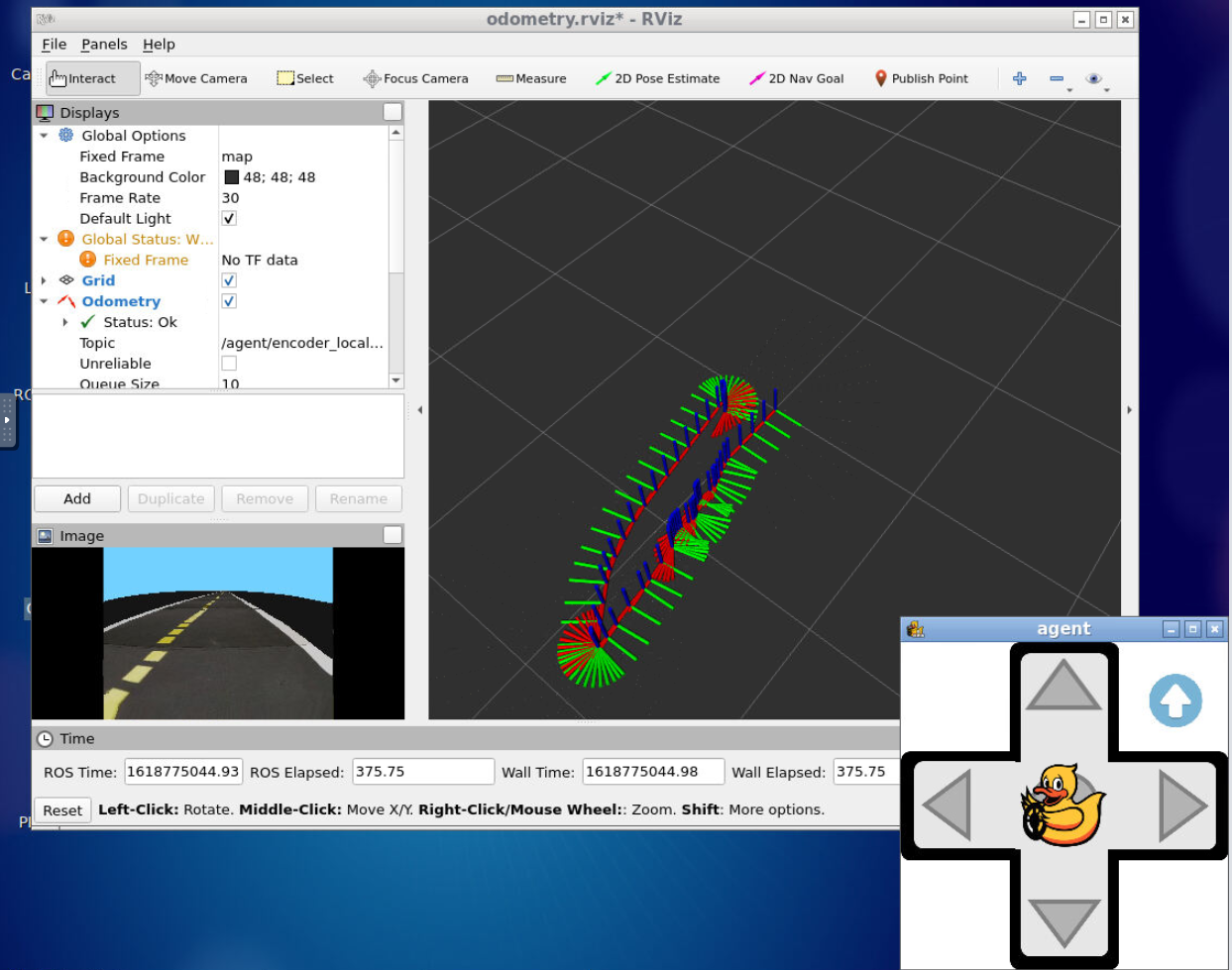
Fig. 153 Using RVIZ, ROS and the Duckietown keyboard controller to test odometry reconstructions.#
Testing with the Duckiematrix#
To test your code in the Duckiematrix you will need a virtual robot attached to an ongoing session.
1. Creating and starting virtual Duckiebot#
To test your code in the Duckiematrix you will need a virtual robot. You can create one with the command:
dts duckiebot virtual create --type duckiebot --configuration DB21J [VBOT]
where [VBOT] is the hostname. It can be anything you like, subject to the same naming constraints of physical Duckiebots. Make sure to remember your robot (host)name for later.
Then you can start your virtual robot with the command:
dts duckiebot virtual start [VBOT]
You should see it with a status Booting and finally Ready if you look at dts fleet discover:
| Hardware | Type | Model | Status | Hostname
--- | -------- | --------- | ----- | -------- | ---------
[VBOT] | virtual | duckiebot | DB21J | Ready | [VBOT].local
2. Starting the Duckiematrix with the virtual Duckiebot#
Now that your virtual robot is ready, you can start the Duckiematrix. From this exercise directory do:
dts code start_matrix
Note
If you are using a Duckietown Workspace, run dts code start_matrix --no-renderer inside the dev container, then launch the Duckiematrix renderer from a local terminal outside the dev container with dts matrix run.
You should see the Unity-based Duckiematrix simulator start up. For more details about using the Duckiematrix see Simulation and the Duckiematrix.
Building the Code#
From inside the learning experience root directory, you can build your code with:
dts code build -R ROBOT_NAME
where ROBOT_NAME can be either a physical or virtual robot.
To run the WebGL (browser) version of the Duckiematrix, add the --browser flag.
Note
For the WebGL (browser) version of the Duckiematrix, if the colors look desaturated, try a different browser.
Testing on a Duckiebot or in the Duckiematrix#
🚙 To test your code on your real Duckiebot you can do:
dts code workbench -R [ROBOT_NAME]
💻 To test your code in the Duckiematrix:
dts code workbench -m -R [VIRTUAL_ROBOT_NAME]
(note the -m flag which means that we are running in the matrix)
In another terminal, you can launch the noVNC viewer, which can be useful to interact with the virtual robot in different ways depending on the specific LX.
dts code vnc -R [ROBOT_NAME]
where [ROBOT_NAME] could be the real or the virtual robot (use whichever you ran the dts code workbench and dts code build command with).
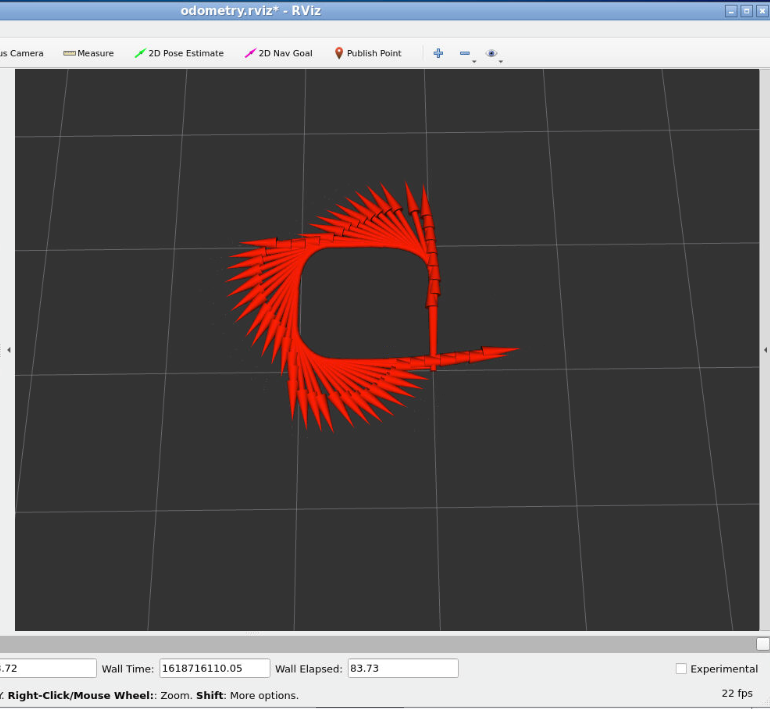
Fig. 154 Example of good odometry from a dead rekoning estimator using wheel encoder data on a physical Duckiebot. The robot starts and ends at the same position, and the estimate does not drift significantly.#
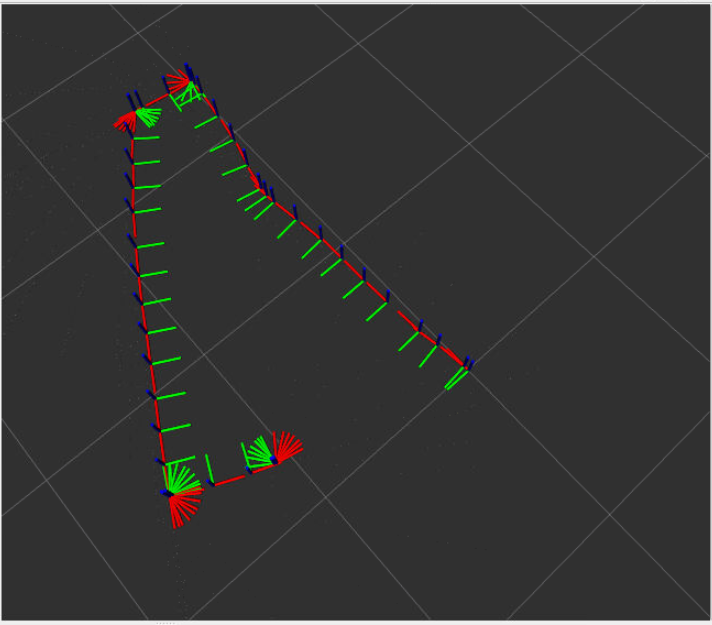
Fig. 155 Example of less good odometry from a dead rekoning estimator using wheel encoder data on a physical Duckiebot. The robot starts and ends at the same position, but the estimate drifts significantly.#
Troubleshooting#
If you run into any issues while building the image, you can search the troubleshooting symptoms below or reference the How to Get Help section of this manual.
Troubleshooting
SYMPTOM
dts : The path '...' does not appear to be a Duckietown project. : The metadata file '.dtproject' is missing.
RESOLUTION
You need to be in the root directory of the LX in order to run the dts code commands.
Troubleshooting
SYMPTOM
When running dts code editor I get an error: dts : No valid DTProject found at '/path/to/lx'
RESOLUTION
Make sure your are executing the commands from inside a learning experience folder (e.g., */lx-control/)
Troubleshooting
SYMPTOM
My virtual robot (named, e.g., VBOT) hangs indefinitely when trying to update it.
RESOLUTION
Try to restart it with: dts duckiebot virtual restart VBOT