Duckietown Hardware
Contents
Duckietown Hardware#
We are firm believers that you cannot learn about robotics without a robot.
Our core objective in the design of the hardware was to provide a platform that is as simple and inexpensive as possible, but still able to provide a wide range of challenging and reproducible learning experiences.
See also
To acquire Duckietown hardware, visit the Duckietown online store.
Duckiebots#
The Duckiebot is a small differentiable drive robot that is simple yet powerful. It is equipped with a camera, wheel encoders, as well as other sensors. It is powered by a custom battery that we have built to enable live diagnostics and advanced power management behaviors. The DB21 family of Duckiebots use NVIDIA Jetson Nano for computation.

Fig. 218 The Duckiebot is a small-scale robot that we have developed for autonomy education and research.#
The platform has gone through several iterations, for a full breakdown of the configurations see Duckiebot Models.
Also, for complete detail about the components of the Duckiebot, as well as its operation, refer to the Part 1 of this book.
Duckietown#
To guarantee the reliable performance of the Duckiebot, we have also designed a custom environment, the Duckietown, for the Duckiebot to operate in.
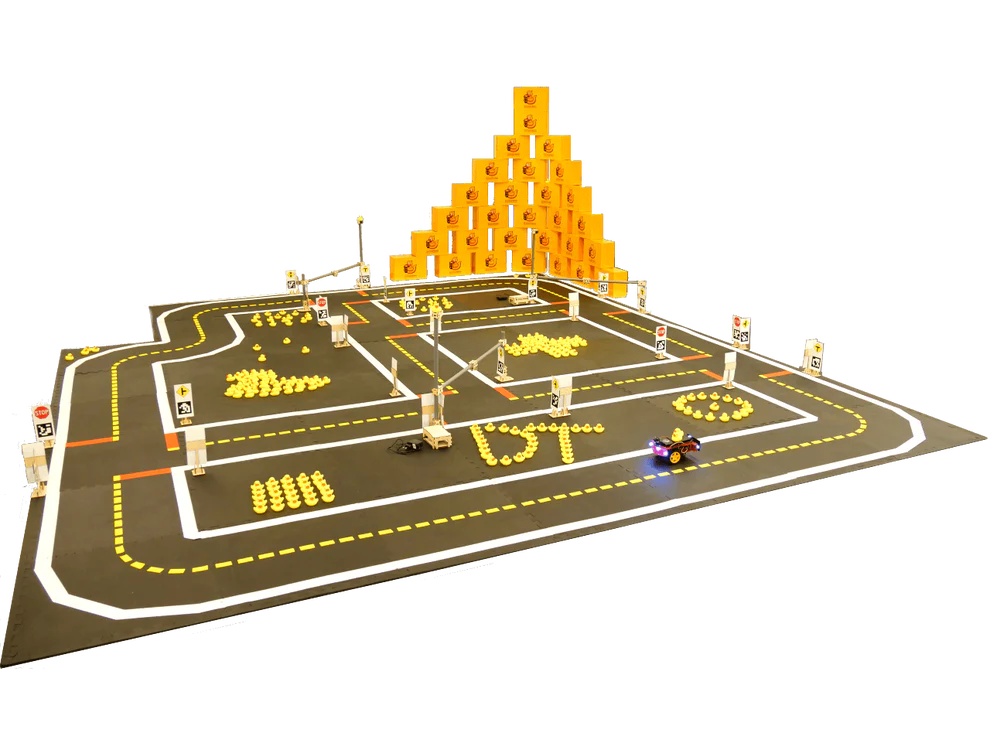
Fig. 219 Duckiebots operate in Duckietowns, which can have arbitrary topologies as long as the appearance specifications are respected.#
The environment is very tightly specified. For full details, visit the Duckietown Operation Manual.
You might be tempted to build a Duckietown out of off-the-shelf components. While it is totally possible, make sure to understand the underlying design criteria to prevent future headaches.
Duckiedrones#
We have also more recently developed a flying robot, that we refer to as the Duckiedrone.
Duckiedrones are Raspberry Pi-powered autonomous quadcopters, and are designed to introduce younger learners to robotics and autonomy.
For full details on the platform, visit the Duckiedrone Operation Manual.

Fig. 220 The Duckiedrone is a Raspberry-Pi based autonomous quadcopter.#