Duckiematrix installation
Contents
What you will need
A working Duckietown Shell installation: Duckietown Shell (dts)
What you will get
A successful Duckiematrix installation
Knowledge on how to start the Duckiematrix
Knowledge of Duckiematrix optional features
Duckiematrix installation#
The Duckiematrix automatically installs the first time it is run, so no explicit installation action is required.
To get started immediately, open a terminal, and run:
dts matrix run --standalone --embedded --map sandbox
There are two ways to use the Duckiematrix from Workspaces:
(better performance) If
dtsis installed on the host machine:Inside the Workspace, start the engine with:
dts matrix engine run --sandbox --verbose
On the host machine instead, start the renderer with:
dts matrix run
and it will automatically connect to the engine running inside the workspace.
Note
To run the Linux version of the Duckiematrix on Windows, add
--os-family linuxto the above command.(broader compatibility) If
dtsis not installed on the host machine, inside the Workspace, run:dts matrix run --standalone --sandbox --verbose --browser
the renderer will be run through the browser (WebGL).
Note
For the WebGL version of the Duckiematrix, if the colors look desaturated, try a different browser.
Note
After the Duckiematrix renderer window opens, click on it and press
How to run the Duckiematrix#
As seen above, the command to (install and) run the Duckiematrix is dts matrix run.
However, two additional pieces of information are required:
Where is the engine running. Options are:
locally (choice for most use cases): add the
--standaloneflag to thematrix runcommand;remotely: read Using a remote engine.
Which map to load. Options are:
use a default map: Duckiematrix maps
create your own map: Using a Custom Map
Common optional run flags#
--help: get a comprehensive list of optional flags with explanations of use.--map: followed by the path of a customized map.--embedded: in conjuntion with--mapwhen using one of the default maps. For example, you can run thedemomap in an engine with:dts matrix engine run –embdedded –map demo
--no-tutorial: by default, the Duckiematrix runs in tutorial mode, where the key bindings are introduced at startup. Use this flag to disable this introduction. Note that relevant keyboard bindings can always be found though the “Settings” tab in the renderer (bottom left of the screen).--verbose: provide a more detailed terminal output, useful for debugging in case of need.--browser: to run the browser (WebGL) version of the Duckiematrix, especially useful when using Duckietown Workspaces on macOS or Windows OSs.
Note
For the WebGL (browser) version of the Duckiematrix, if the colors look desaturated, try a different browser.
Using a remote engine#
To run a local renderer and connect it to a remote engine, specify the location of the engine (as a hostname or IP address) using the --engine flag:
dts matrix run --engine ENGINE_HOSTNAME
Note
If you are using a Duckietown Workspace and the engine is running inside the dev container, run this renderer command from a terminal on your host machine.
In this case you do not need to specify a map since that was already specified when the Duckiematrix engine
was initially run.
Connecting a Duckiebot to a remote engine#
Once a Duckiematrix engine is running, you can “attach” a Duckietown robot, physical or virtual, to an entity in the simulated world:
dts matrix attach [--engine ENGINE_HOSTNAME] DUCKIEBOT_NAME ENTITY_NAME [--dreamwalk]
where:
ENGINE_HOSTNAMEis not necessary if the engine is running locally.DUCKIEBOT_NAMEis the hostname of your virtual or physical robotENTITY_NAMEis the name of the entity in the Duckiematrix world you are attachingDUCKIEBOT_NAMEto. A list of available entities for the engine running can be found in the map configurations or more simply by clicking on theRobotstab at the bottom of a Duckiematrix rendering window, and then looking at theName.
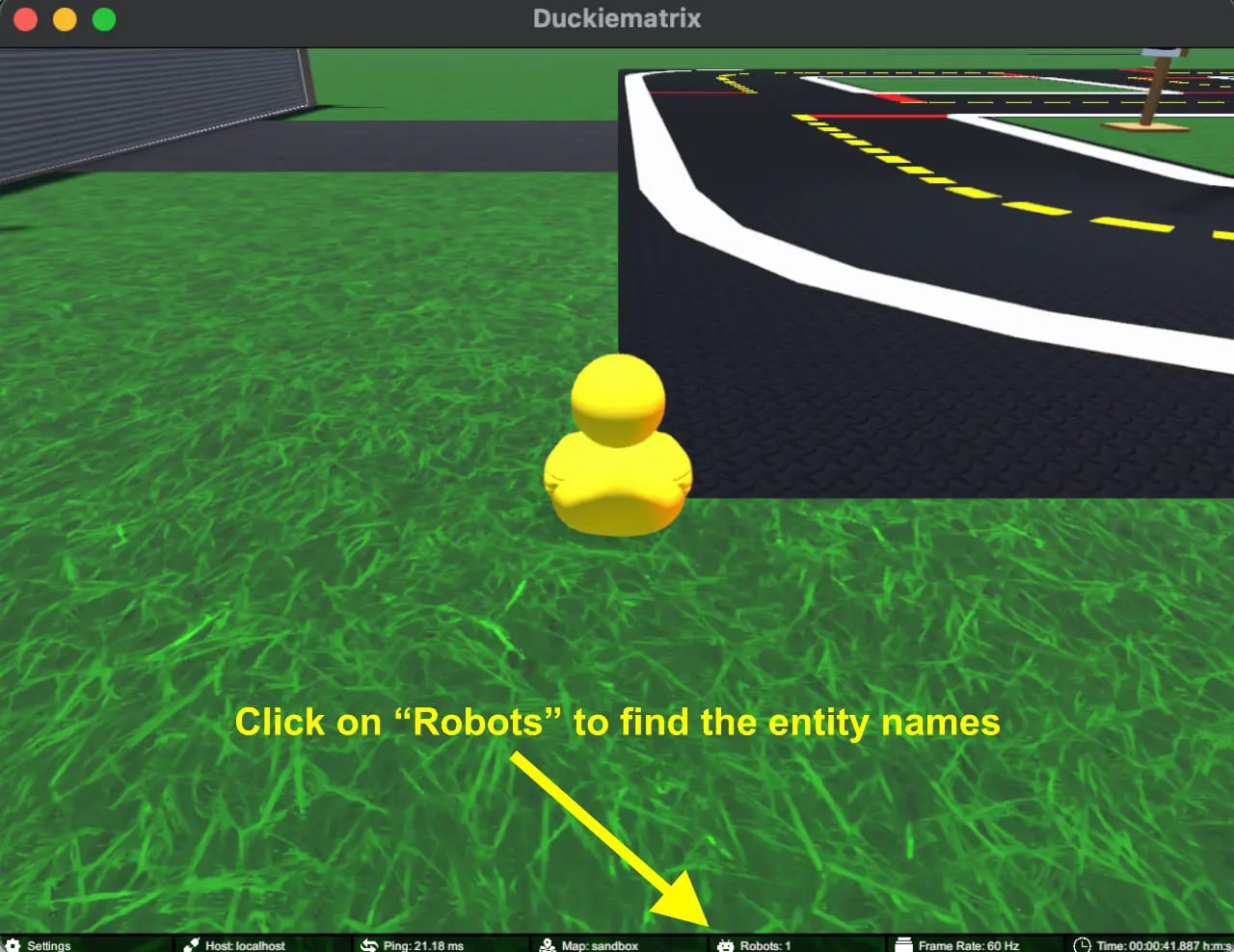
Fig. 3 Find the available entity names by clicking on the “Robots” section#
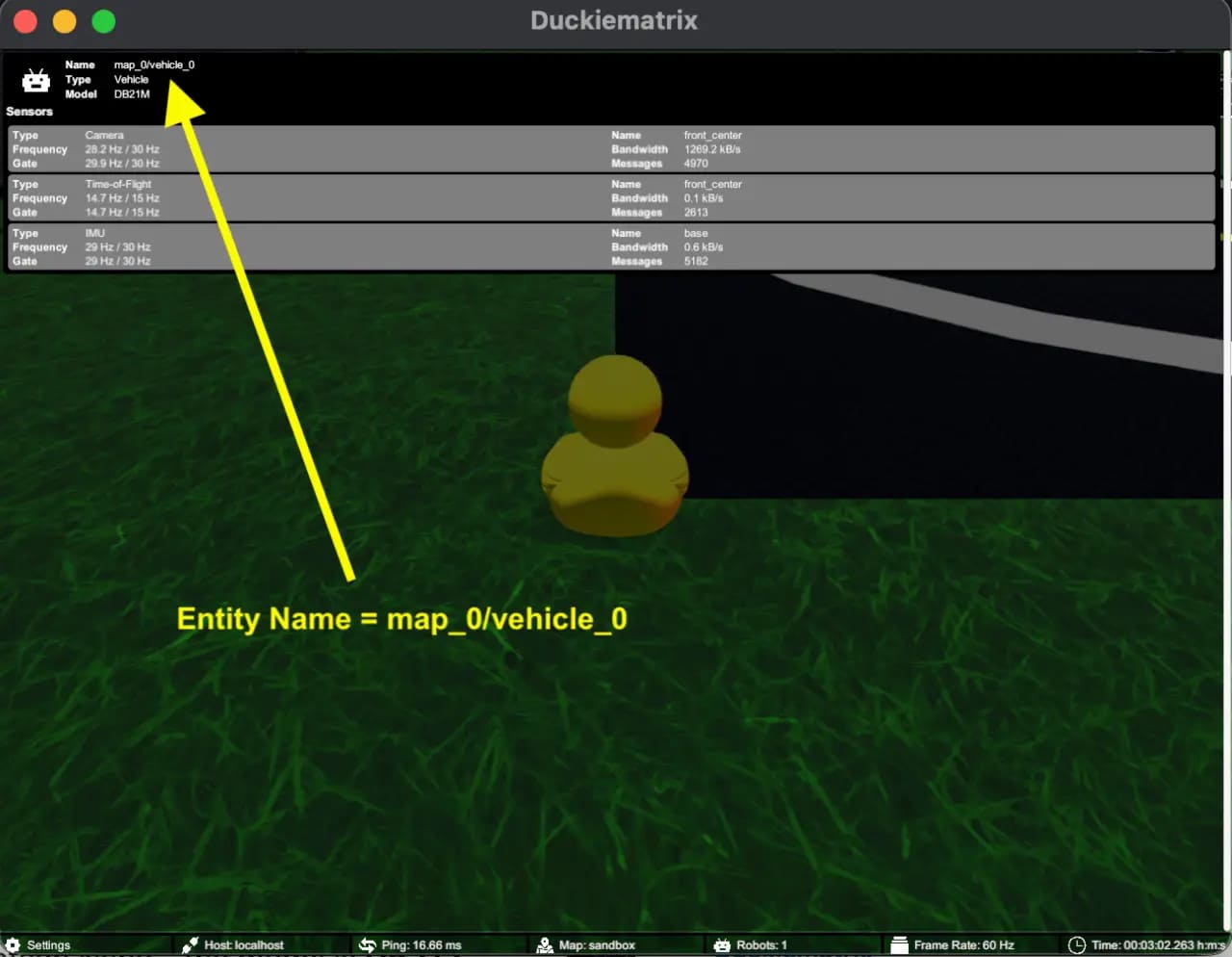
Fig. 4 The default entity name for a Duckiebot is map_0/vehicle_0.#
Duckiematrix maps#
With respect to the map, you can choose to either define your own map and tell the Duckiematrix where to find it
on the file system, or you can choose to use one of the default maps that are provided by including the --embedded flag.
The default maps are named:
sandbox: 5x5 tiles map with 4x 3-way intersections, traffic lights, demo traffic signs, watchtowers, one DB21 Duckiebot and garage for calibrations.
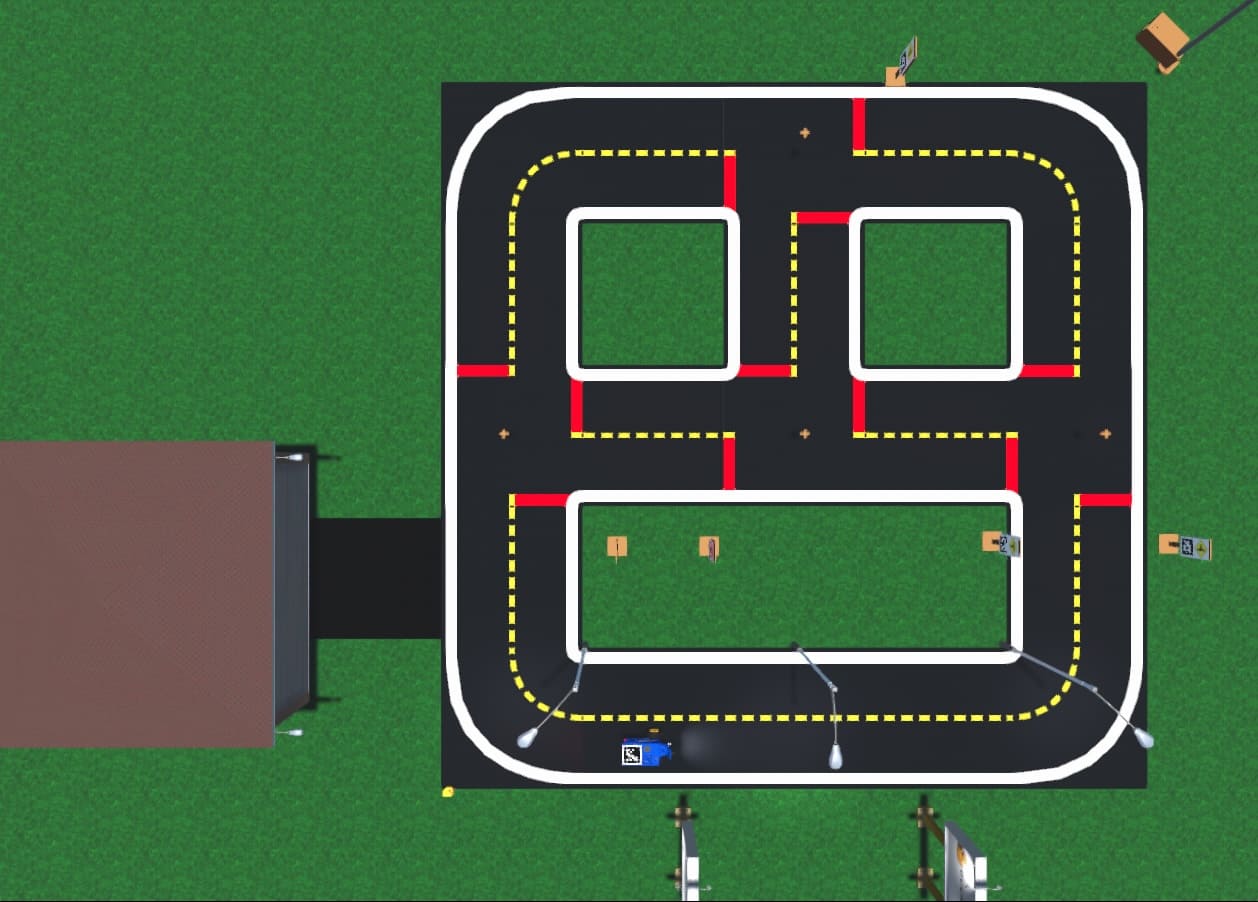
Fig. 5 The default sandbox map.#
demo: same map layout and content assandboxmap, but including multiple Duckiebots (DB21, DB19), night-day cycle, and ornamental moving duckies.
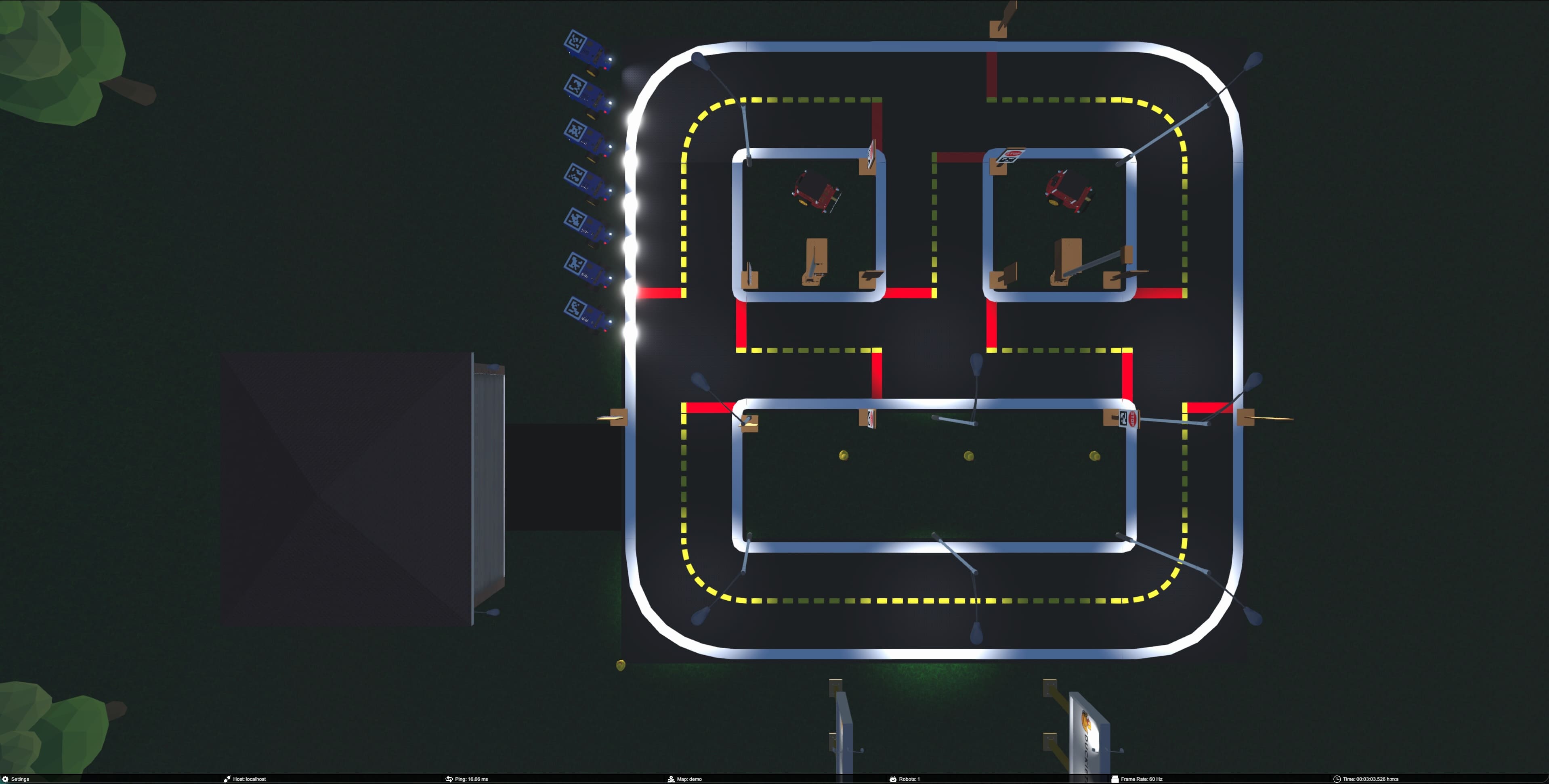
Fig. 6 The default demo map includes multiple Duckiebots and night-day cycle.#
empty: empty map (only grass)
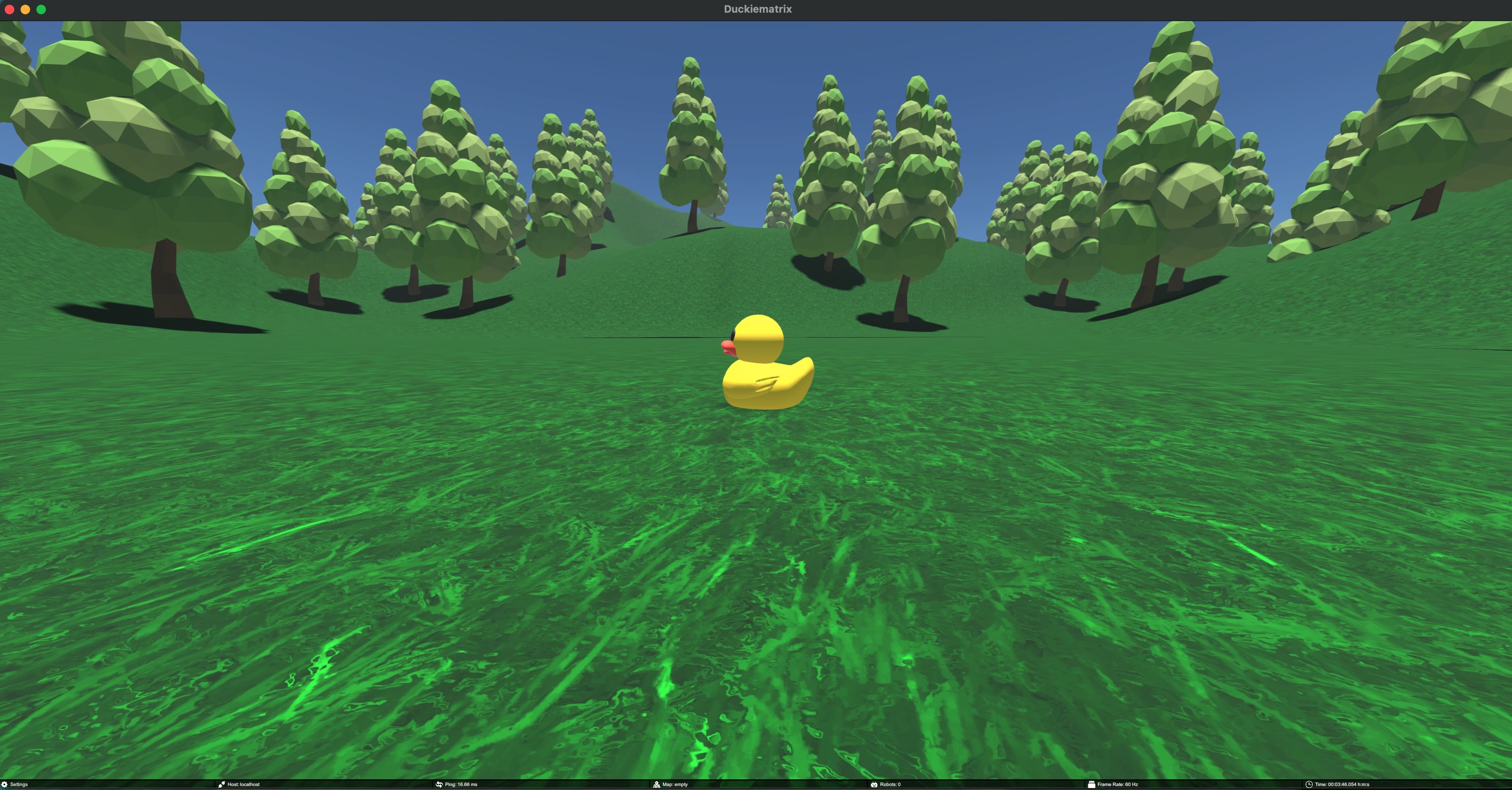
Fig. 7 The default empty map.#
intersections: same map layout assandbox, but with one intersection having traffic signs arranged according to the appearance specifications. Good map for testing intersection navigation agents.
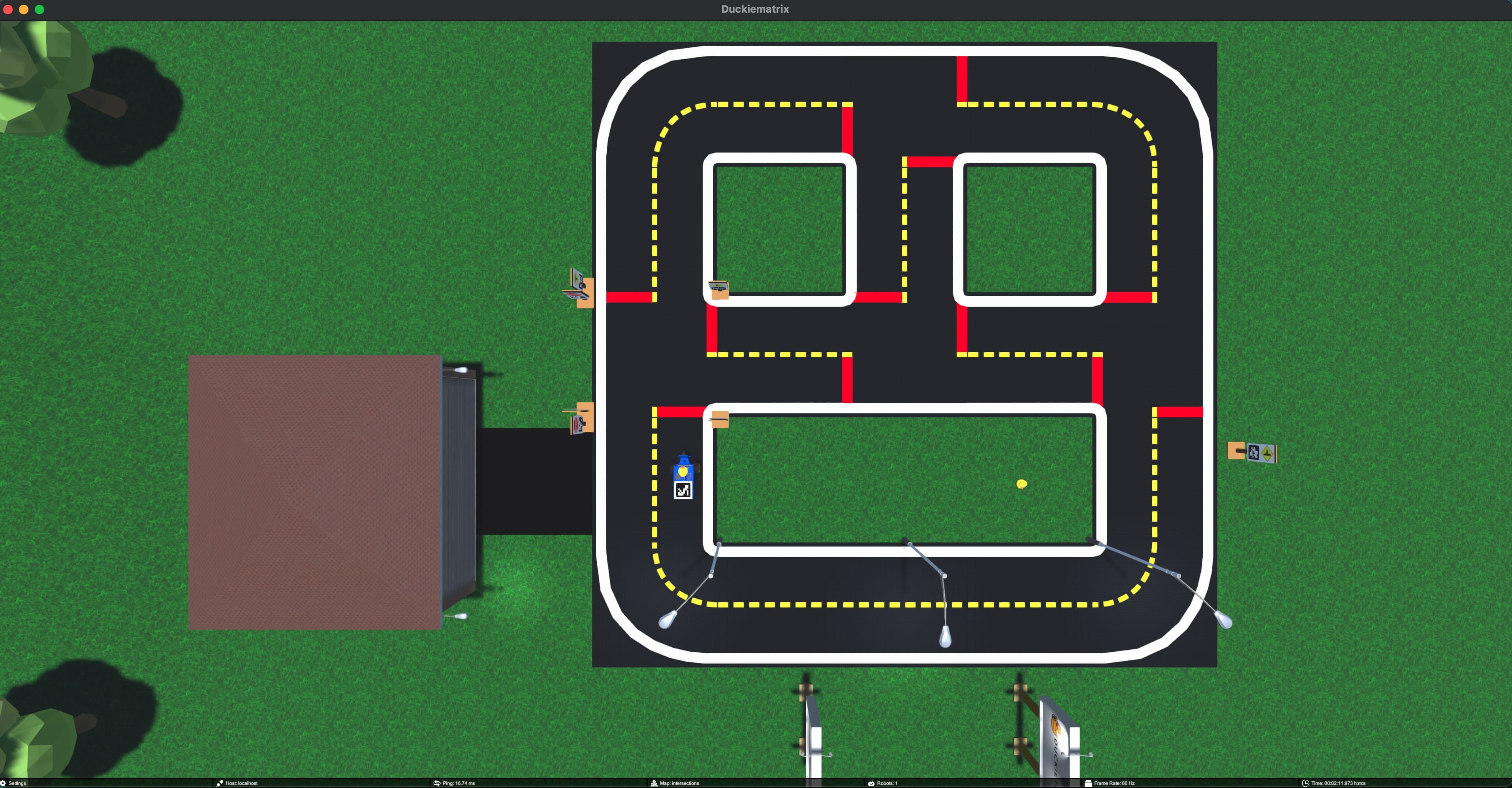
Fig. 8 The default intersections map.#
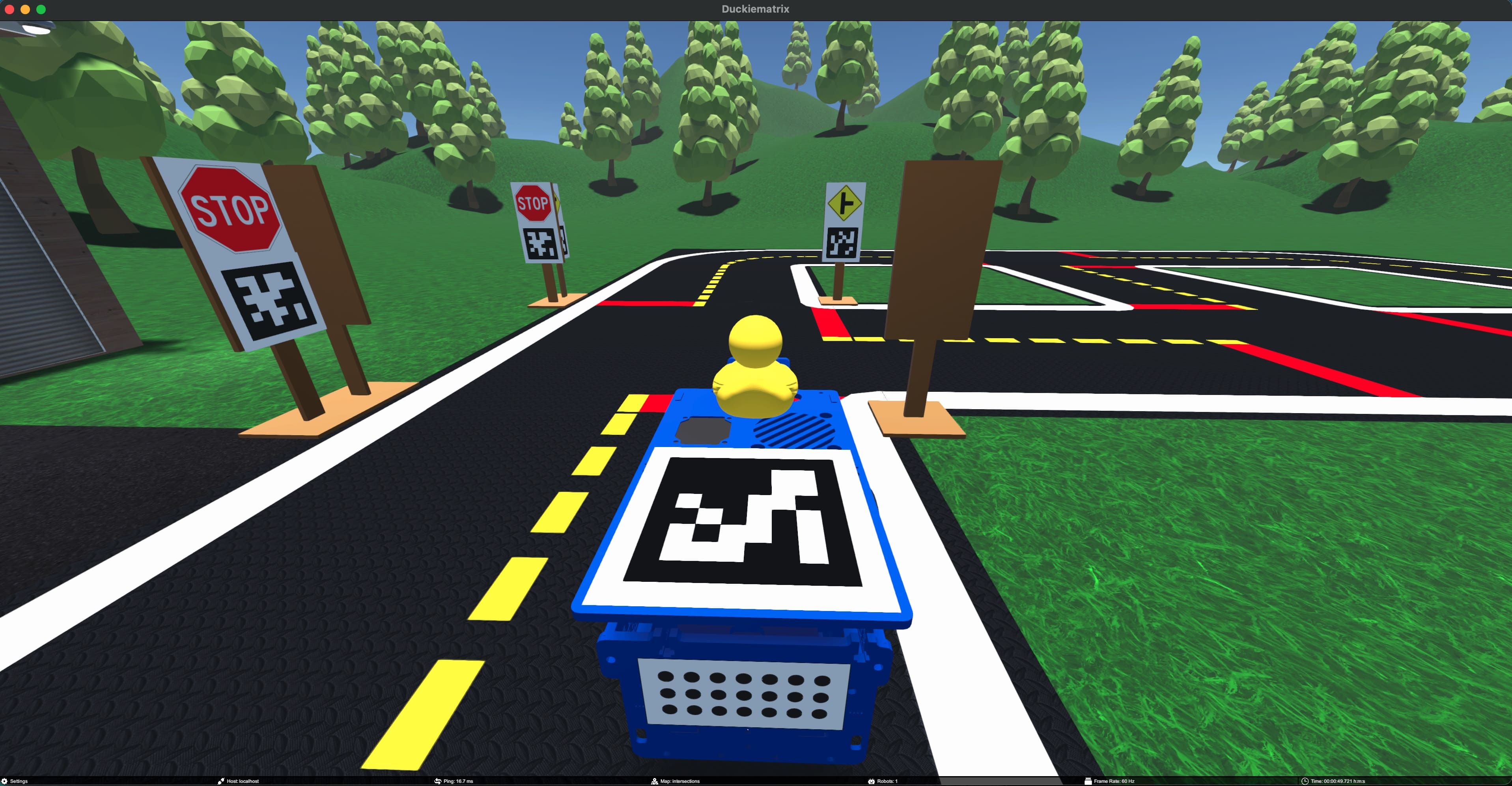
Fig. 9 The default intersections map from a Duckiebot’s point of view.#
loop: 3x3 tiles minimal road loop; the smallest legal Duckietown. One DB21 Duckiebot on the track.
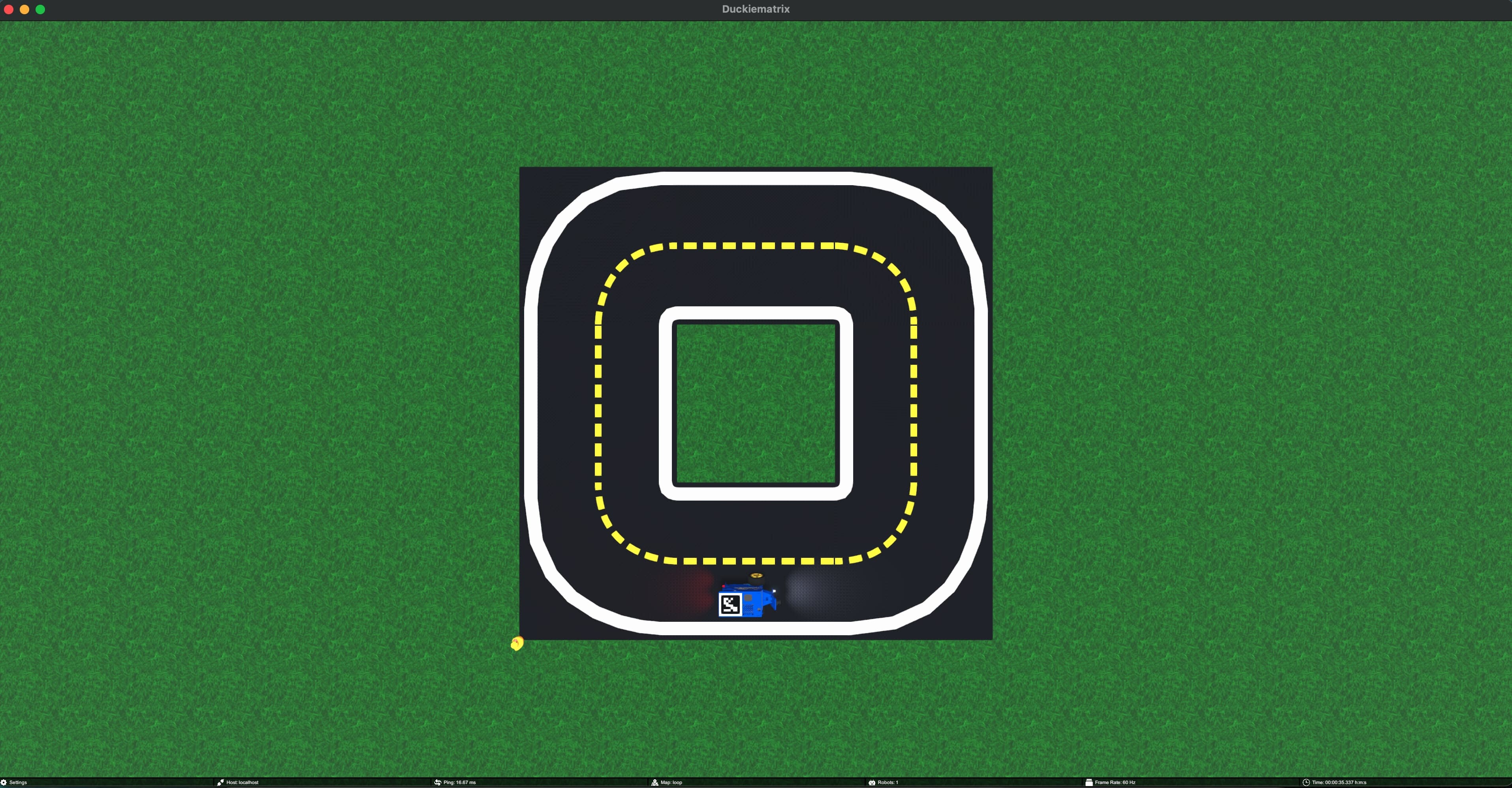
Fig. 10 The default loop map: the minimal Duckietown.#
In summary, the following command:
dts matrix run --standalone --embedded --map sandbox
will:
download and install the latest version of the Duckiematrix if it has not already been installed,
start it on your local machine and load the
sandboxmap.
Note
If you are using a Duckietown Workspace, the --standalone flag starts both the Duckiematrix Engine and Renderer in the same environment. For the split workspace workflow, start the Engine separately and connect to it with dts matrix run from a local terminal outside the dev container.
Using a Custom Map#
The Duckiematrix map loaded in the engine can be locally defined. To learn how to create a compliant map read: creating Duckiematrix compliant maps. This map can then be loaded by omitting the --embedded flag and specifying the path, i.e.:
dts matrix run --standalone --map PATH_TO_MAP
Note
If you are using a Duckietown Workspace, the --standalone flag starts both the Duckiematrix Engine and Renderer in the same environment. For the split workspace workflow, start the Engine separately and connect to it with dts matrix run from a local terminal outside the dev container.