Links
Contents
Links#
This chapter describes Duckiematrix Links.
What you will need
Completed Duckiematrix installation
What you will get
Knowledge on Duckiematrix Links
Introduction#
In previous chapters, we saw how to run an instance of the Duckiematrix.
However, you may have noticed that the robots were not doing much more than sitting and waiting.
This is because we did not tell the Engine where to get robot commands from.
We can tell the Engine to setup a communication channel with one of those robots and return to us the other end of the line, using Links, or more properly World Links.
What is a Link?#
A Link is a bidirectional communication channel between a Matrix and World entity.
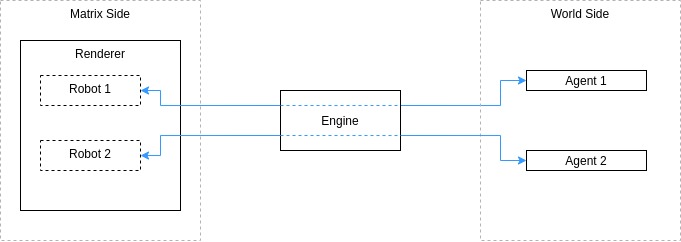
Fig. 205 An example of Links between two Matrix and World entities.#
How to Link a Matrix and World entity#
To Link a Matrix and World entity, run the following command, where MATRIX is the Matrix key (e.g., map_0/vehicle_0) and WORLD is the World side proxy name (e.g., duckiebot):
dts matrix run --standalone --embedded --map sandbox --link MATRIX WORLD
Note
If you are using a Duckietown Workspace, the --standalone flag starts both the Duckiematrix Engine and Renderer in the same environment. For the split workspace workflow, start the Engine separately and connect to it with dts matrix run from a local terminal outside the dev container.