Assembly Variant (DB21Jv3)
Contents
Assembly Variant (DB21Jv3)#
This section describes the differences in assembly procedure between a Duckiebot DB21J and DB21Jv3.
What you will need
The components for a Duckiebot
DB21-J4v3(default Duckiebot on the Duckietown online store since November 2025).
What you will get
An assembled Duckiebot DB21J(v3).
Note
The DB21Jv3 is a hardware variant of the DB21J, introducing small quality of life improvements: a new omnidirectional wheel, and replacing metal screws and nuts with Nylon ones for chassis assembly.
You can continue following the main DB21J assembly instructions to assemble your Duckiebot, and only review the new omnidirectional wheel assembly instructions here.
Omnidirectional Wheel#
Step 1: The Omnidirectional wheel components#
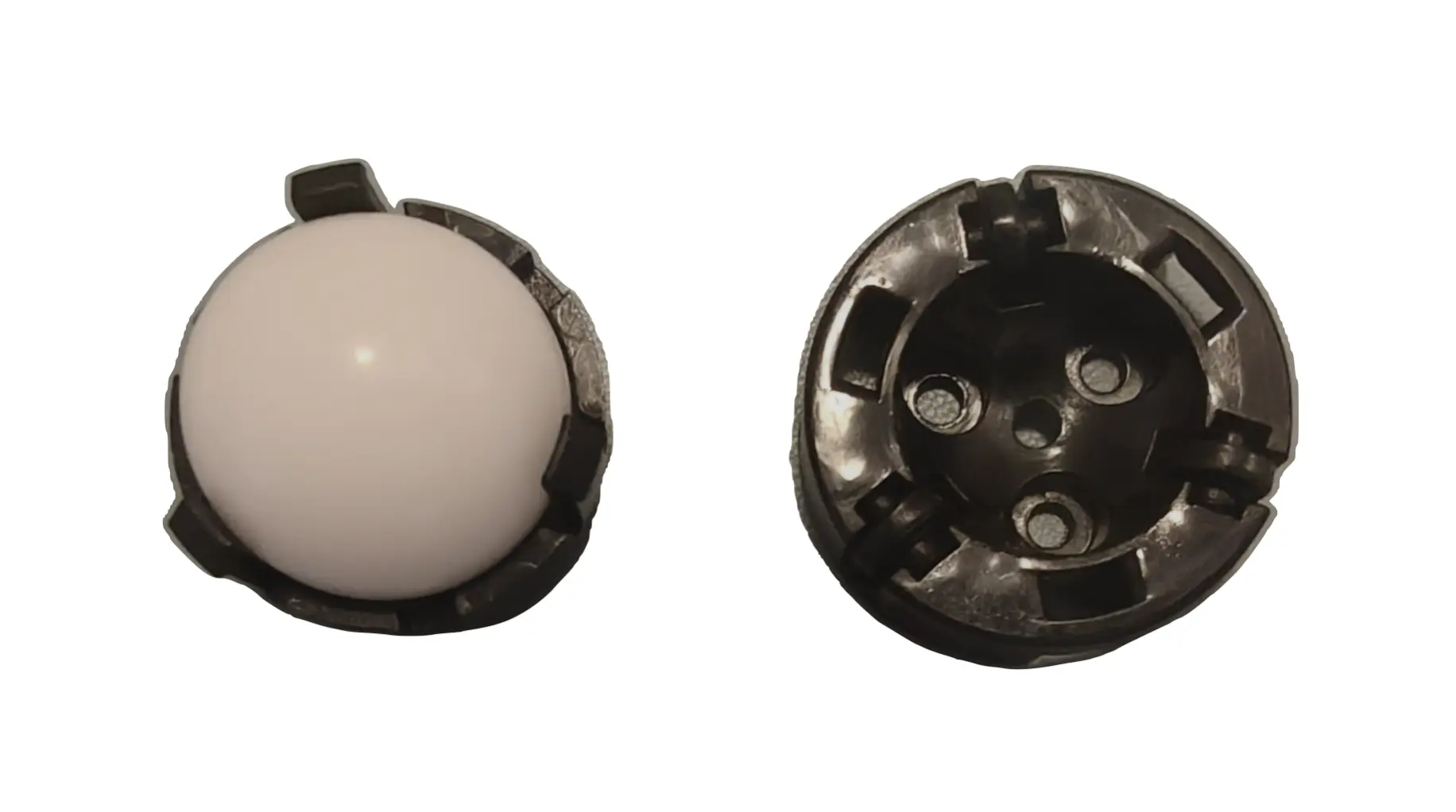
Fig. 28 Disassembled omnidirectional wheel showing the base plate (right), white sphere and cover (left).#
Step 2: Placing the connection screws#

Fig. 29 Wheel base plate with nylon screws positioned.#
Step 3: Connecting the support standoffs#

Fig. 30 Connecting the support standoffs to the omnidirectional wheel base plate.#
Step 4: Placing the sphere#

Fig. 31 White sphere positioned in the base plate housing.#
Step 5: Enclosing the omnidirectional wheel#

Fig. 32 Place the cover over the spere until “it clicks”.#
Step 6: Assembled omnidirectional wheel with supports#
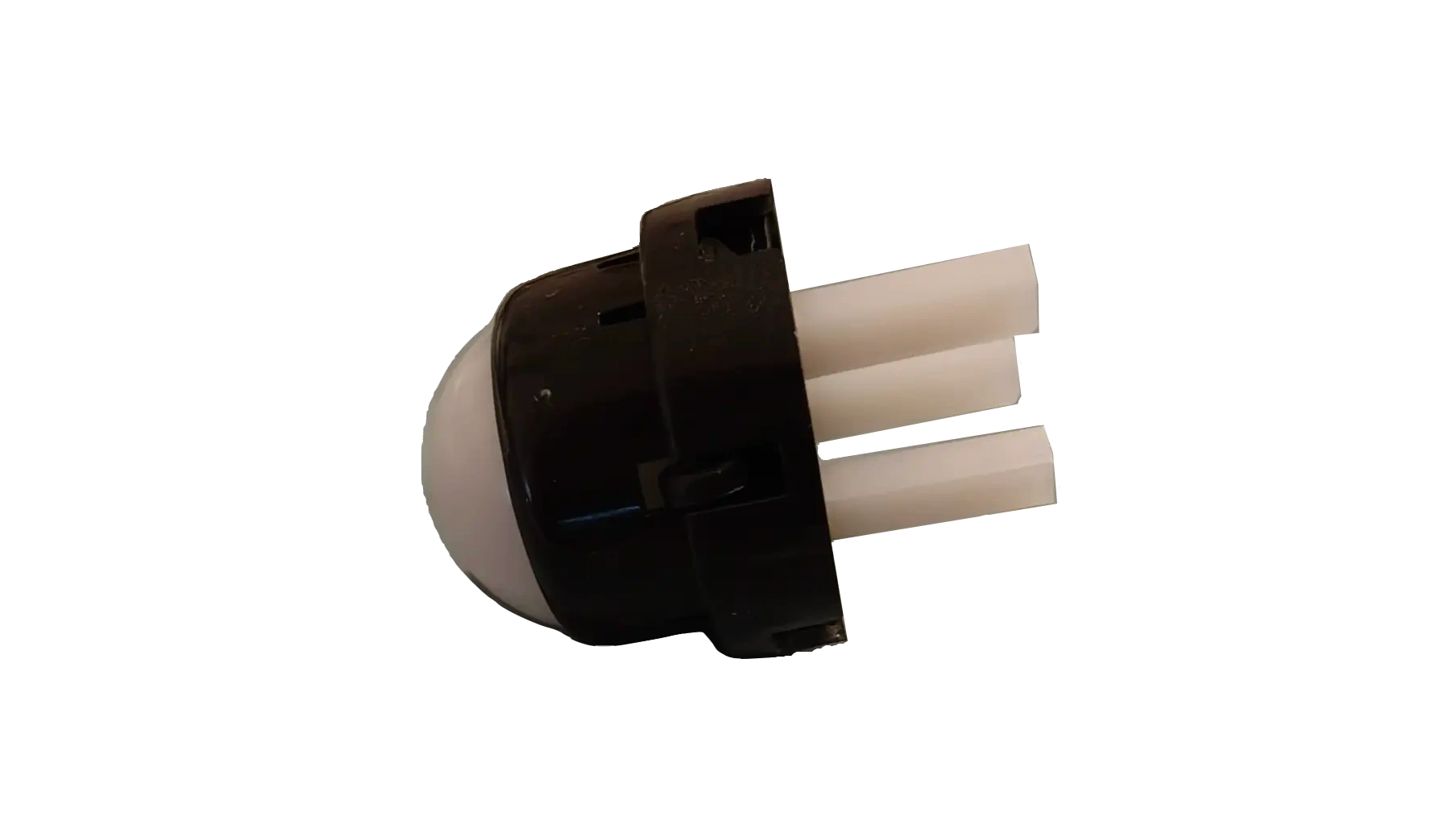
Fig. 33 Assembled omnidirectional wheel with supports.#
Step 7: Connecting the wheel’s standoffs with the chassis#
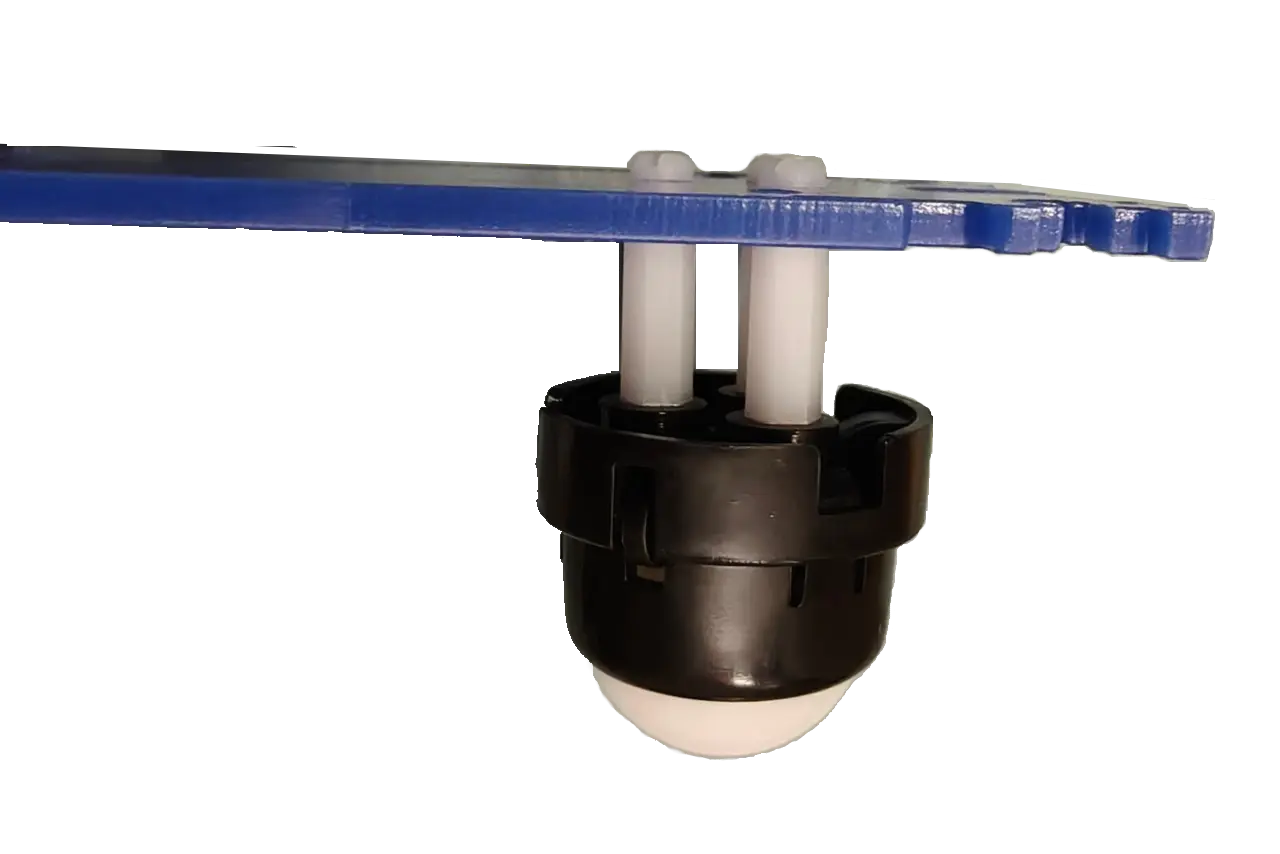
Fig. 34 Omnidirectional wheel assembly connected to the Duckiebot’s chassis.#
See also
You can now continue the assembly from the main instructions, from Step 6.
Troubleshooting#
Troubleshooting
SYMPTOM
I am not sure if I have a DB21Jv3
RESOLUTION
Check the omnidirectional wheel in your Duckiebox. If it is made of metal, you have a DB21J. If it is made of plastic, you have a DB21v3.